Лаборатория реактивного движения НАСА разрабатывает заводной вездеход для изучения Венеры
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Древняя технология вдохновила на создание будущего вездехода, способного годами работать при температуре в 500°C
Древняя технология вдохновила на создание будущего вездехода, способного годами работать при температуре в 500°C
Самый долгий промежуток времени, который космический аппарат смог продержаться на поверхности Венеры – 127 минут. 1 марта 1982 года советский зонд Венера-13 аккуратно спустился на парашюте и смог проработать чуть более двух часов благодаря тому, что все компоненты компьютера были спрятаны в герметичном титановом кожухе, предварительно охлаждённом на орбите. Температура на поверхности Венеры в среднем составляет 464 °C – это больше, чем на поверхности Меркурия (ближайшей к Солнцу планеты), и достаточно горячо для того, чтобы обычная электроника не смогла работать.
Не только температура делает Венеру неприятным местом для компьютеров – давление на поверхности составляет 90 атмосфер, что эквивалентно давлению на глубине в 900 м в земном океане. И если вас успокоит то, что дожди серной кислоты, зарождающиеся в верхних частях атмосферы Венеры, не достигают поверхности, то знайте, что там так темно (как в самый пасмурный день на Земле), что добыча солнечной энергии будет чрезвычайно неэффективной.
 Фотографии поверхности от советского зонда «Венера-13», спустившегося на Венеру и работавшего там чуть более двух часов
Фотографии поверхности от советского зонда «Венера-13», спустившегося на Венеру и работавшего там чуть более двух часов
Душная атмосфера, делающая поверхность Венеры такой неприятной, ужасно хорошо справляется с минимизацией количества данных о поверхности, которые мы можем собрать, находясь на орбите – поэтому было бы очень-очень здорово, если бы там внизу оказался робот, высматривающий там всё для нас. Большая часть идей, связанных с исследованием поверхности Венеры, находится примерно в том же ключе, что и советские зонды: засунуть электронику внутрь изолированного контейнера, подключённого к невероятно мощной системе кондиционирования воздуха, и работающего, вероятно, от радиоактивного двигателя Стирлинга с плутонием в качестве топлива. Исследование и разработка такой системы будут стоить миллиарды.
Традиционный подход к вездеходу для Венеры труден, недёшев и опасен. Но команда инженеров из лаборатории реактивного движения НАСА [Jet Propulsion Laboratory, JPL], расположенной в г. Пасадена, шт. Калифорния, придумала инновационную идею для изучения поверхности Венеры. Если проблема в электронике, почему бы не избавиться от неё и не создать механический вездеход?
Получив финансирование по программе НАСА «Передовые инновационные концепции» (NIAC), команда JPL хочет узнать, возможно ли построить вездеход для исследования Венеры без традиционных датчиков, компьютеров и источников питания. Вездеход-автоматон для экстремальных условий [Automaton Rover for Extreme Environments, AREE] мог бы использовать часовые шестерёнки, пружины и другие механизмы для обеспечения большей части функциональности вездехода, включая питание, хранение энергии, зондирование, движение и коммуникации – без всякой электроники. Поддайте жару.
 Внутренности индикатора местоположения «Глобус», использовавшегося на космическом корабле «Восход»
Внутренности индикатора местоположения «Глобус», использовавшегося на космическом корабле «Восход»
В перегруженном электроникой мире большинство из нас не понимает, что можно осуществить при помощи механических компьютеров. Две тысячи лет назад, плюс-минус столетие, древние греки сконструировали Антикитерский механизм, способный вычислять положение Солнца и Луны, показывать фазы Луны, предсказывать затмения, отслеживать календарные циклы, и, вероятно, показывать положение пяти планет, используя набор из 30 точно выверенных бронзовых шестерней, движимых валом с рукояткой.
Между XVII и XIX веками Блез Паскаль, Готфрид Лейбниц и Чарльз Беббидж разрабатывали механические компьютеры, способные на различные арифметические вычисления. Ближе к современности, в 1940-х, механические компьютеры активно использовались в таких жёстко практических целях, как управление артиллерийским огнём и сброс бомб.
Русские использовали механический компьютер «Глобус» для подсчёта местоположения их космического корабля до 2002 года, но в целом сейчас всё делается на электронике. И ладно бы, но только не на Венере, где использование большей части электроники будет непрактичным.
Концепция JPL касательно AREE – создать робота с минимальным набором электроники, и по большей части полагаться на механические системы, без проблем способные работать с высокими температурами неделями, месяцами и даже годами. Джонатан Саудер – технолог и инженер по мехатронике в группе введения технологий в JPL, и глава проекта AREE. Мы побеседовали с ним, чтобы лучше понять, как начался этот проект и как всё будет работать.
Как вы придумали идею AREE?
Джонатан Саудер: мы сидели с кучей инженеров и работали на собрании одновременной разработки. Во время одного из перерывов на кофе мы разговаривали о крутых механизмах и компонентах, и как было бы круто сделать полностью механический космический корабль, как бы он выглядел, и где бы его можно было использовать. Мы поняли, что осмысленно нечто подобное было бы использовать в двух местах, где электроника не выживет: одно – это Венера, поскольку самое долгое, сколько мы могли выжить на поверхности Венеры, это два часа, а второе – Юпитер, из-за радиоактивной окружающей среды, нарушающей работу электроники.
Возможно ли построить роботизированный вездеход без электроники?
В фазе I проекта NIAC мы предложили нашу идею построить полностью механический вездеход, вообще не использующий электричество или электронику, и заменить все стандартные электронные подсистемы механическими вычислителями. Начав изучать этот вопрос, мы поняли, что мы не можем построить традиционный вездеход типа Curiosity с централизованным процессором. Нам необходимо было сконцентрироваться на более распределённой архитектуре, в которой в одном устройстве собрано множество простых механизмов, управляющих им, сигнализирующих ему и сообщающих ему, куда идти.
Сначала мы хотели осуществить ряд научных измерений при помощи механики. Мы начали разбираться с этим вопросом и поняли, что у нас не получается добывать данные с достаточной точностью для создания изображений или измерения таких параметров, как температура и давление. Существуют различные варианты высокотемпературной электроники – на основе карбида кремния и галлия – работающие при высоких температурах. Проблема в том, что их очень сложно интегрировать. Получалось, что с их помощью нельзя организовать традиционную электрическую систему, и нельзя сделать ничего такого, что хотя бы близко подходило к требованиям, необходимым для создания вездехода. Поэтому мы решили создать мобильную платформу, способную к перемещению, изучению новых мест и способную работать гораздо дольше, чем существующие системы.
 Ранний концепт AREE, с ногами
Ранний концепт AREE, с ногами
С чего началась разработка AREE?
Основная цель – создать мобильную архитектуру наивысшей возможной надёжности. А уже вторая цель – использовать как можно больше простых, распределённых, реагирующих на внешние воздействия механизмов, способных направлять вездеход по поверхности Венеры. Заметьте, что на ранних изображениях вездеход сильно напоминал Strandbeest — «ходячих животных» Тео Янсена, кинетические скульптуры, расхаживавшие по пляжам Нидерландов. Strandbeest работает с парой простых датчиков, управляющих движением ног вперёд или назад, и встроенной логикой, помогающей избегать мягкого песка и воды.
На ранних этапах выработки концепции мы работали непосредственно с Янсеном: он приехал в JPL на двухдневную совместную работу, и мы получили от него опыт, накопленный за 30 лет работы со Strandbeest. Одним из первых его советов был отказ от ног. И, знаете, когда человек, создавший Strandbeest, говорит вам, что вездеходу на Венере ноги не нужны, это значит, что вам и правда нужно придумать что-то другое. Ключевая проблема в том, что ноги, отлично работающие на плоских мягких пляжах, оказываются нестабильными, когда вы переносите их на более разнообразную поверхность, например, на неизвестное венерианское окружение, что повышает вероятность переворота и повреждения вездехода.
В результате наша архитектура перешла с фазы I в фазу II, от круто выглядящего вездехода с ногами до менее крутой, но более надёжной и практичной версии вездехода, выглядящего как танк времён Первой Мировой войны.

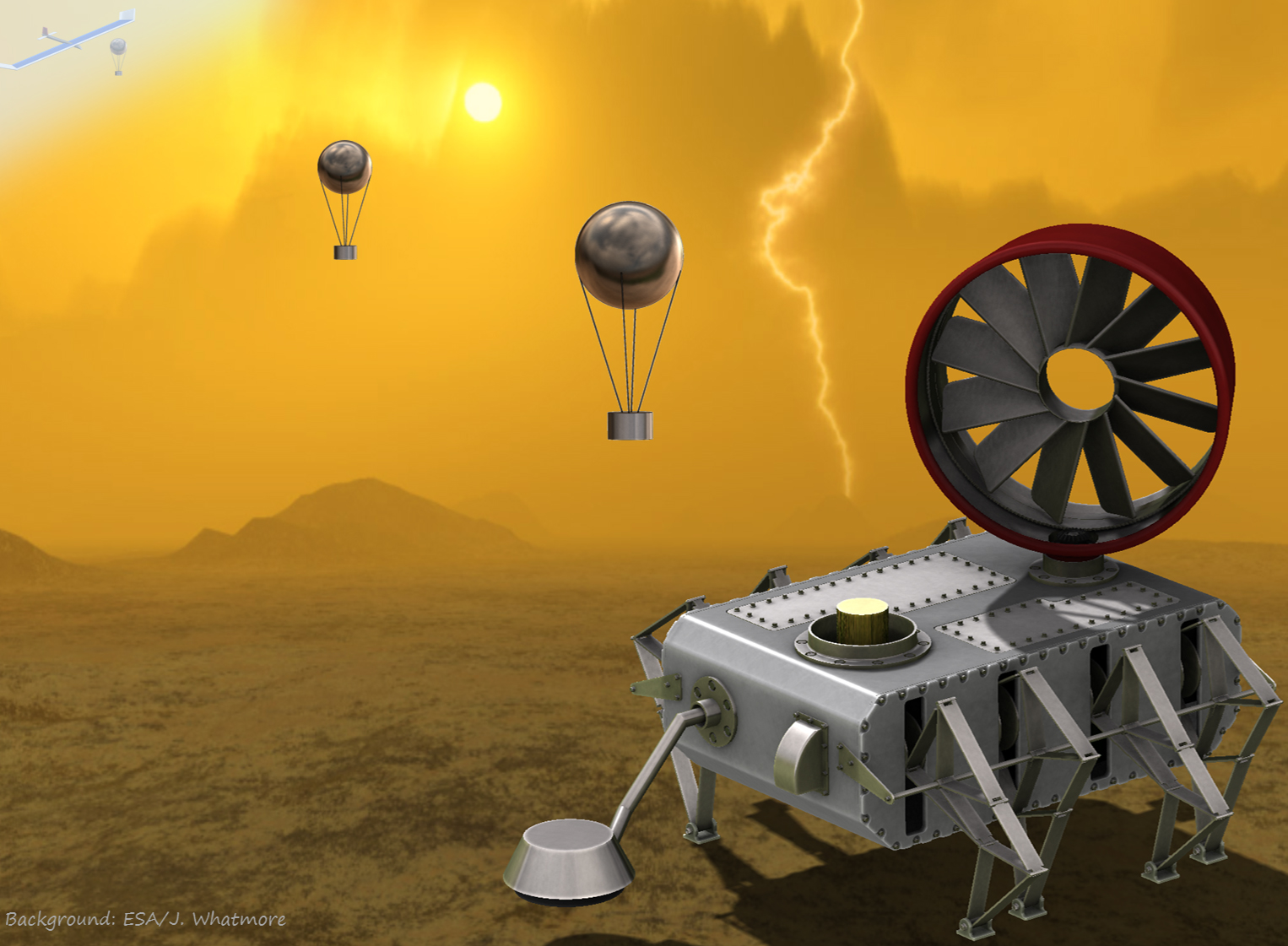
*Концепция фазы II, с гусеницами и встроенной ветровой турбиной. При возможном перевороте вездеход всё равно сможет двигаться.*## Можете ли вы описать, как AREE сможет двигаться по поверхности Венеры?
Мы разрабатываем специализированные системы для обхода препятствий и определения наличия необходимого для движения количества энергии, вместо обычной централизованной системы, позволяющей вездеходу выполнять несколько процессов или перенастраивать вездеход при помощи ПО.
Мы пытаемся максимально упросить эти механизмы, чтобы каждый выполнял свою конкретную задачу, но выполнял её хорошо. Возможно, столкновение вездехода с объектом перекинет рычаг, что заставит его отъехать немного назад, повернуться на 90º, и снова поехать вперёд. Система обхода препятствий у нас может быть только одна, но подобное действие можно повторять множество раз, и в итоге с его помощью можно обойти препятствие.
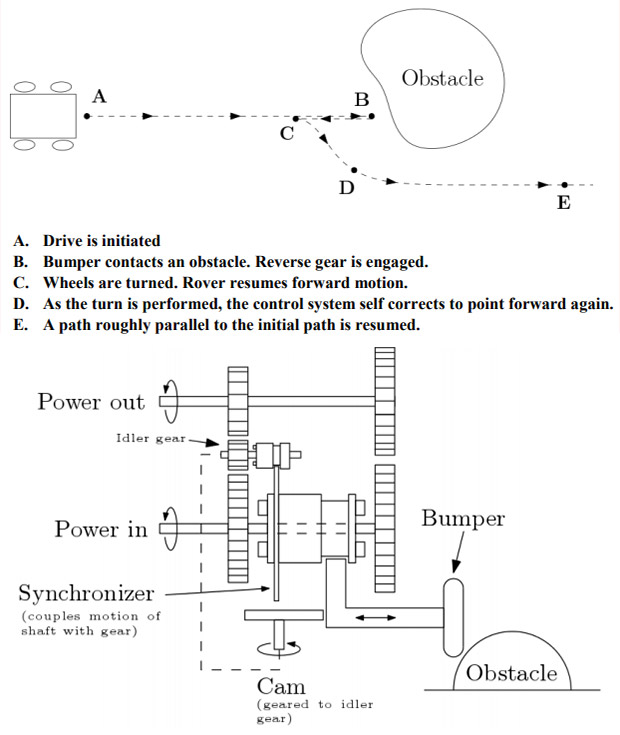
Система избегания препятствий использует бампер, шестерёнки с переключениями и эксцентрик. Она способна отводить вездеход после удара назад, а затем заново включать бампер и переключать передачи, и продолжать движение вперёд. Во время нормального движения вперёд усилие передаётся с входного вала через шестерни в правой части диаграммы на выходной вал. Оставшиеся шестерни будут вращаться свободно. При встрече с препятствием синхронизатор включает заднюю передачу, что приводит к обратному эффекту. После полного поворота эксцентрика он передвинет бампер обратно в переднее положение. Такой же эксцентрик можно использовать для поворота колёс вездехода при заднем ходе двигателя.
Какие возможности AREE уникальны по сравнению с другими проектами венерианских вездеходов?
На сегодня существует несколько концепций венерианских миссий, каждая из которых обойдётся в сумму, сравнимую с Mars Curiosity, и предлагает посадку в одном месте или двух местах. Большая часть предложений очень сложна и рассчитана на работу от 2 до 24 часов на поверхности. Мы планируем работать в течение месяца, и именно тут работает наша ключевая инновация – возможность прозондировать множество мест на поверхности Венеры и понять, как она меняется со временем.
Можете описать, как будет выглядеть идеальный AREE, соответствующий вашим ожиданиям?
Идеальный робот сможет работать на самых сложных поверхностях Венеры, называемых тессерами, представляющих собой грубую, каменистую лаву, сверху похожую на паркет или черепицу. Наша цель – провести вездеход по такой поверхности, взять геологические образцы, которые поспособствуют нашему пониманию эволюции Венеры. Идеальный вездеход должен быть размером немногим более 1,5 м – сейчас это ограничение налагается тепловым щитом. Если бы мы могли, мы бы увеличили его до 2,5 м, чтобы он мог преодолевать более крупные препятствия и получать больше энергии от ветра.
В итоге нужно сделать вездеход, способный преодолевать большую часть препятствий, который бы полз и полз вперёд, медленно но верно, собирал образцы и данные о погоде.
 Концепция путешествия по равнинам в сторону тессер. Во время основной части миссии, длящейся 116 земных дней (один венерианский суточный цикл) вездеход пройдёт 35 км. Расширенная миссия позволит ему пройти расстояние до 100 км в течение трёх лет.
Концепция путешествия по равнинам в сторону тессер. Во время основной части миссии, длящейся 116 земных дней (один венерианский суточный цикл) вездеход пройдёт 35 км. Расширенная миссия позволит ему пройти расстояние до 100 км в течение трёх лет.
К этому моменту вы уже можете начать удивляться – зачем же мы будем посылать заводной вездеход на исследование поверхности Венеры, если мы не сможем получить от него весточек – ведь без электроники, как он сможет отправить нам какие-нибудь данные? Существуют способы механического хранения данных – довольно легко временно хранить числа, а примерно 1 мегабит данных можно занести на металлический фонограф. Ну а что дальше?
Одна из идей, не такая безумная, как кажется на первый взгляд – использовать водородные шары для поднятия металлических записей в верхние слои атмосферы Венеры, где их будет перехватывать высотный беспилотник, работающий от солнечной энергии, читать их и передавать их содержимое на спутник, находящийся на орбите. Исследователи также рассматривают вариант радио на электронных лампах, но хотя эти лампы и способны работать при высоких температурах, они будут уязвимыми в венерианской атмосфере, и им будет грозить потеря герметичности.
Но разработчики AREE придумали другую идею: радарные отражатели. Радарный отражатель, закреплённый на вездеходе, можно будет увидеть с орбиты, и разместив перед отражателем затвор, можно будет передавать порядка 1000 бит информации при каждом проходе спутника. Добавив несколько отражателей с разной отражающей способностью, а также затворы, работающие на разных частотах, можно передавать до 32 уникальных переменных в день. Кроме того, в некоторых случаях можно будет даже не передавать определённые цифры – например, разместив вентилятор перед отражателем, можно будет измерять скорость ветра в разных местах поверхности.
Теперь, создав такой уникальный по возможностям и надёжности вездеход, способный выживать на Венере, нужно понять, какого рода научные изыскания он сможет выполнять – и это особенно сложный вопрос для AREE, как объясняется в предложении фазы I конкурса NIAC:
Одно из главных слабых мест чисто механической системы – возможности для научных изысканий. Кроме коммуникаций, ключевой областью, где пригодилась бы высокотемпературная электроника, служат научные инструменты. Более сложные измерения, особенно геологические, требуют электронных решений.
В конце прошлого года НАСА анонсировала программу HOTTech, программу работающих при высокой температуре технологий, финансирующую «передовые разработки технологий для автоматизированного исследования высокотемпературного окружения, в котором температуры приближаются к 500 градусам Цельсия, или превосходят эту отметку». AREE надеется, что в результате HOTTech появятся научные инструменты, способные выжить на их вездеходе – но и для иного исхода у них есть несколько интересных идей заниматься наукой безо всякой электроники. Например, измерение скорости ветра при помощи турбины, температуры и давления при помощи расширяющихся от температуры материалов, а химических свойств – при помощи стержней, реагирующих на определённые химические соединения.
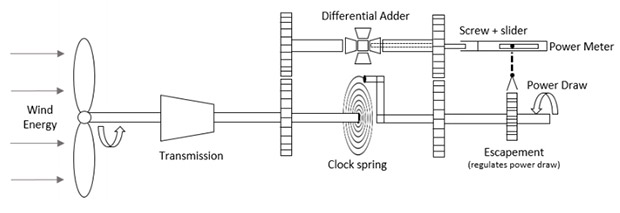 Энергия ветра хранится в композитной пружине. Механическая система на схеме способна измерять хранящуюся в пружине энергию, и использует сцепление для передачи энергии в систему движения, когда её накапливается достаточно. Если вы хотите, чтобы вездеход двигался по прошествии определённого времени, или по достижении других условий, можно добавить механические логические вентили, реагирующие на часы или другие датчики.
Энергия ветра хранится в композитной пружине. Механическая система на схеме способна измерять хранящуюся в пружине энергию, и использует сцепление для передачи энергии в систему движения, когда её накапливается достаточно. Если вы хотите, чтобы вездеход двигался по прошествии определённого времени, или по достижении других условий, можно добавить механические логические вентили, реагирующие на часы или другие датчики.
Саудер с командой не пытаются создавать всю эту механику просто для развлечения. Исследовать Венеру на промежутке большем, чем день-два – действительно важная задача. «Наша цель – не воспроизвести то, что уже было сделано, или скоро станет возможным в области высокотемпературной электроники, – говорит Саудер, – но создать набор механических решений для тех областей, в которых пока ещё не существует ясных решений».
Разрабатываемая в рамках проекта AREE технология может пригодиться и в других местах Солнечной системы – и не только в таких местах с высоким уровнем радиации, как Европа, одна из лун Юпитера. Здесь, на Земле AREE может пригодиться для сбора образцов близко к активному вулкану или в областях с высоким уровнем радиации. Ещё одно преимущество AREE – его можно полностью стерилизовать при высокой температуре, совершенно не повредив функциональность. Допустим, если под полярной шапкой Марса найдётся озеро с какой-нибудь необычной формой жизни, можно будет отправить туда на сбор образцов стерильный AREE, и не беспокоиться о загрязнении.
Сейчас AREE получил финансирование второй фазы NIAC. Команда работает над более детальной разработкой системы движения, которая, скорее всего, приведёт к замене гусениц на какие-нибудь колёса, что более надёжно. Также они разрабатывают механические часы, способные работать при высоких температурах – одна из основных частей автономного механического компьютера. Саудер говорит, что они ожидают интересных результатов от постройки и проверки радарной системы передачи сигналов в течение года. Нам тоже это очень интересно – это один из самых инновационных роботов, что мы видели, и нам не терпится увидеть, как он попадёт на Венеру.
В команду AREE, управляемую Саудером, также входят Эван Хильгеман, Майкл Джонсон, Аарон Парнес, Берни Бьенсток и Джеффри Холл [Evan Hilgemann, Michael Johnson, Aaron Parness, Bernie Bienstock, Jeffery Hall]. Джесси Кавата и Кэтрин Стек [Jessie Kawata, Kathryn Stack] – дополнительные авторы окончательного отчёта для фазы I.
- Источник(и):
- Войдите на сайт для отправки комментариев
