Новый подход к нейроморфным вычислениям
Нейроморфные процессоры, построенные по принципу взаимодействия нейронов, показывают лучшие результаты в области искусственных нейронных сетей\задач машинного зрения. Однако далеки от имитации процессов, происходящих в мозгу. Одна из многих причин — астроциты, самые многочисленные клетки глии.
Считалось, что они выполняли поддерживающую функцию в работе нейронов, однако исследования последних десятилетий показывают, что данный тип клеток делает гораздо больше, чем просто заполняет пространство между нейронами, как считали исследователи на протяжении более столетия. Исследования показывают, что эти клетки также играют ключевую роль в функциях мозга, включая обучение и генерацию центрального паттерна (central pattern generation — CPG), который является основой для ритмических поведений, таких как дыхание и ходьба.
Минусы существующих нейроморфных решений
Предположение, что обучение происходит только при сильных связях между нейронами, неверно. На самом деле, обучение и память оптимально сбалансированы в сетях, которые макроскопически работают на грани хаоса, узкий динамический режим в значительной степени игнорируется в алгоритмах обучения, но также проявляется мозгом.
По большей части в нейроморфных решениях, отсутствует сочетание вычислительной эффективности глобальной цели сети с универсальностью локального, зависящего от деятельности, механизма.
Нейронно-астроцитарная сеть
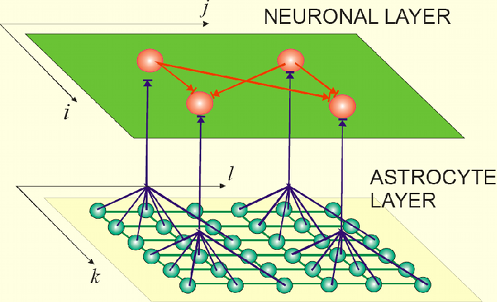
Осознавая этот пробел в существующей литературе, исследователи из Университета Рутгерса разрабатывают мозговые алгоритмы, которые также учитывают и воспроизводят функции астроцитов.
Они предлагают (осторожно, тавтология) мозг-морфический контроллер CPG, основанный на всесторонней нейронно-астроцитарной сети, которая генерирует две модели походки для робота. Основываясь на недавно выявленных астроцитарных механизмах нейромодуляции, они предлагают нам архитектуру CPG, которая легко интегрируется в нейроморфный чип Intel Loihi, используя среду взаимодействия в реальном времени между чипом и средой роботизированной операционной системы (ROS).
Loihi CPG может использоваться для управления шагающим роботом с устойчивостью к сенсорному шуму и изменяющимися профилями скорости.
Невероятно интересно наблюдать за развитием новых архитектурных подходов в сфере имитации работы мозга. Сейчас ведутся исследования и эксперименты, которые сильно изменят нашу жизнь в будущем. И наши рабочие места.
- Источник(и):
- Войдите на сайт для отправки комментариев
