Зooробототехника: новое поколение звероподобных роботов уже выходят из лабораторий
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Создатели роботов все больше внимания уделяют миру живых организмов. Эволюция наделила последних уникальными «приспособлениями» и «механизмами», которые оказываются жизненно необходимыми в борьбе за выживание. Не редко именно природа становится автором самых оптимальных вариантов таких «штучек». И лучше уже не придумаешь! Как результат этого внимания – яркое разнообразие звероподобных роботов.
До недавнего времени большинство роботов можно было условно разделить на два типа.
- Виджетофора – это устройства с клешнями, ковшами и колесами, которые состояли только из крайне необходимых деталей и не претендовали на какое-то либо отличие от других машин (вспомните робота R2-D2 из «Звездных войн»).
- Второй тип, антропоиды, которые наоборот, всячески подражают своих создателей – эти существа имеют руки и кисти, ноги и ступни, а также лица (вспомните андроида С-3РО из той же фантастической саги). Несколько созданных человекоподобных роботов, которые стояли между этими категориями, обычно напоминали домашних животных (например, робопес АIBO компании Sony) и были не более чем забавными игрушками.
Но это уже не игрушка – пришло робототехникам в голову (однако с опозданием), что они что-то недосмотрели. Большой природный дизайнер – эволюция – решила проблемы, с которыми не могут справиться ни виджетофора, ни антропоиды.
Так почему бы не сымитировать эти испытанные модели, подумали инженеры, чем стараться перехитрить 4 млрд. лет естественного отбора?
Результат – яркое разнообразие звероподобных роботов. Теперь инженеры копируют не только собак, но и высокочувствительных землероек, водоплавающих миног, хватательных осьминогов, ползущих ящериц и роющих моллюсков. Ученые даже пытаются сымитировать насекомых в форме роботов, которые поднимаются в воздух, взмахивая крыльями. Такое направление исследований отодвинуло виджетофору и антропоидов. Зато на передний план уверенно выступил тип зооподобных.
Пример Сесилии Ласки и группы, возглавляемых ею исследователей, в Школе углубленных исследований имени Святой Анны в Пизе хорошо иллюстрируют эту тенденцию. Они – ведущее звено международного консорциума по созданию робота-осьминога.
 Рис. 1.
Рис. 1.
Для создания искусственного головоногого, ученые начали с убойного – в буквальном и переносном смысле – органа этого животного: гибких щупалец. Лапы позвоночных животных созданы так, что ими мышцы двигают, а кости несут вес. А щупальца осьминога не имеет костей, поэтому его мышцы должны делать и то и другое. Преимущество в том, что помимо плотного захвата предметов, щупальце может также добраться к таким закуткам и пролезть в такие щели, которые недоступны позвоночным животным, имеющим лапы подобных размеров.
 Рис. 2.
Рис. 2.
После изучения щупалец Ласки и ее группа создали искусственное щупальце, которое ведет себя так же, как и естественное. Его внешняя оболочка сделана из силикона и имеет сенсоры давления, которые передают информацию о предметах, которых щупальце касается. Внутри оболочки располагаются кабели и пружины с особо эластичного никель-титанового сплава. Благодаря этому щупальце может обкрутится вокруг объекта движением, удивительно похожим на естественное.
Рукотворные соревнования
Пока работу Ласки можно назвать скорее одноногим, чем осьминогом, но она планирует исправить эту ситуацию за два года, добавив еще семь щупалец и систему контроля и координации. Цель – создать автомат, который поможет выполнять сложные подводные работы, например, закрывать вентили на протекающих нефтепроводах.
Другая группа инженеров во главе с Паоло Дарио и Цезаре Стефанини в том же заведении также копируют водных животных, например, миногу.
Миноги – простейшие позвоночные животные нашего времени. Подобно осьминогам у них нет костей (хотя имеют рудиментарный хрящевой скелет). Их нервная система тоже проста, а потому с них хорошо начинать исследование нейронной строения, развитие которого завершился в конечном итоге образованием человеческого мозга. Поэтому группа Стэна Грилнера в Каролинском институте (Стокгольм) уже много лет изучает миног, чтобы глубже понять, как работает нервная система позвоночных животных.
В последнее время они рассматривают роботоверсию миноги. Устройство называется «Лампетра»; оно сделано из круговых сегментов, подобных хрящевым позвонкам этого животного. К каждому сегменту прикреплен электромагнит, который активирует ток, идущий от головы до хвоста подобно передаче нервного сигнала в живом животном. Так сегмент сначала притягивает, а потом отпускает следующий сегмент, создавая волнообразное движение, которое толкает работа вперед.
 Рис. 3.
Рис. 3.
Лампетра имеет глаза в форме маленьких камер и может использовать собранную из них информацию о цвете и форме, чтобы обходить препятствия. Главная цель проекта – объяснить, как позвоночные используют перцепцию для ориентации при движении. Но уникальная движущаяся система Лампетры также может найти полезное применение, поскольку, как оказалось, это очень эффективный способ передвижения робота в воде.
Еще один зоолог, использующий роботов, чтобы изучить поведение реальных животных, Даниэл Герман из Цюрихского университета, исследует моллюсков и строит их роботоверсии. Он пытается понять, как форма раковины влияет на шансы животного выжить.
Многие типы моллюсков избегают хищников, зарываясь в морское дно. Для этого они поочередно передвигают раковиной и мягкой, мускулистой «ногой», которая содержится в раковине. Эти две части по очереди выполняют роль якоря в то время, как вторая часть дальше роет дно. Моллюски также разрыхляют осадочные отложения струями воды, которые они выпускают из раковины. Благодаря этим приспособлениям в случае опасности они могут исчезнуть с глаз за считанные секунды.
Чтобы понять, как в действительности это происходит, Герман спроектировал робота-моллюска. Он имеет двустворчатую раковину, две жилки, которые могут сводить и разводить створки, а также небольшую помпу, которая выталкивает воду. Исследователь все еще работает над строением «ноги». Когда он убедится, что такой механизм может успешно закапываться, то организует соревнования роботов-моллюсков с различными формами раковин, чтобы увидеть, какая форма более эффективна. Герман планирует воссоздать несколько вымерших моллюсков. Когда их механические копии покажут, на что они способны, он сможет проверить гипотезу о том, что современные раковины выжили благодаря тому, что их форма раковины позволяет им зарываться в морское дно эффективнее, чем более древним разновидностям.
Держитесь крепче
Упомянутые выше проекты имеют не только научный интерес, но и практическую ориентированность. Хороший пример – StickybotIII (от англ.sticky ‹липкий› и robot), робот-геккон, который разработала группа исследователей во главе с Марком Куткоски.
 Рис. 5.
Рис. 5.
Люди уже давно дивились тому, как гекконы умеют подниматься по стенам и шагать по потолкам. Робот с такими способностями был бы полезен в разных сферах. Секрет геккона в том, что его пальцы покрыты рядами деликатных образований, напоминающих рубчики, которые видны на отпечатках пальцев человека, но с большими углублениями. Когда палец прижимается к поверхности, молекулы этих рубчиков притягивают молекулы поверхности благодаря электростатическому явлению, которое называется Ван-дер-ваальсовая сила. Если животное (или робот) не слишком тяжелые, этой силы достаточно, чтобы удерживать пальцы в контакте с поверхностью.
Подобно настоящему геккону StickybotIII имеет четыре ноги, а пальцы на них покрыты похожими рубчиками. Эта механическая ящерица способна на такие же трюки, что и живая: она может не только подниматься вертикальной стеной, но и преодолеть стену с выступом.
Применение зооморфных роботов не исчерпывается хитрыми способами передвижения. Они также могут имитировать органы чувств, чувствительность которых намного превышает человеческие способности. Например, Тони Прескотт и возглавляемая им группа исследователей в Шеффилдском университете (Англия) пытаются воссоздать гиперчувствительные усики карликовой белозубки.
Эти землеройки живут под землей и, когда движутся в своих норах, используют для ориентации усики. Английские исследователи изучили замедленную видеозапись белозубок и установили, что они постоянно водят усиками, дважды касаясь всего, что кажется интересным.
Используя эту информацию, исследователи сконструировали Shrewbot (от англ. Shrew ‹землеройка› и robot), который воспроизводит устройство головы этой крохотной зверушки. Устройство имеет 18 усиков разной длины; специальная программа движет ими, каждым независимо от других, и использует собранную информацию, чтобы решить, стоит объект исследовать дальше. Пока Shrewbot может отличить гладкую поверхность от рифленой. Исследователи надеются, что вскоре он будет уметь распознавать основные фигуры, например сферы, кубы и цилиндры.
В планах на будущее – построить робота, который сможет работать там, где зрение мало что помогает, например, в наполненных дымом зданиях.
Все это очень хорошо, и робот-спасатель – вещь очень полезная. Но многие инженеры особенно стремятся создать робота, который мог бы двигаться, как насекомые: лететь, махая крыльями, и зависать, парить в воздухе. Оснащены камерой, крошечные летучие роботы такого типа могли бы пробираться в слишком малые или опасные для людей места, скажем, враждебные бункеры, и сообщать о том, что в них происходит.
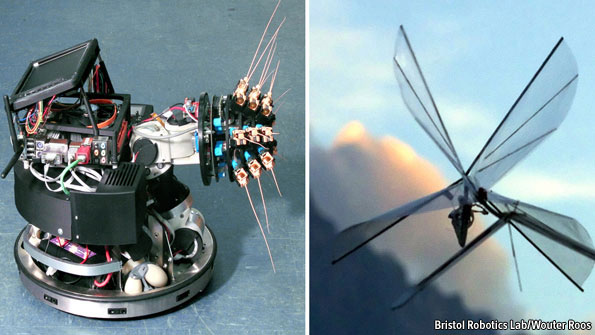 Рис. 6.
Рис. 6.
Исследователи, возглавляемые Риком Руисинком, Дельфтского технического университета (Нидерланды) разработали DelFly – роботоверсию бабочки, которая имеет две пары крыльев и электромотор, который заставляет их делать взмахивающие движения. DelFly может быстро летать, а может и зависать в воздухе, чтобы лучше разглядеть некое место. Первая версия имеет дистанционное управление, то есть это не настоящий, автономный робот. Зато она оборудованная видеокамерой и может использовать собранную из нее информацию, чтобы корректировать высоту и направление полета. Исследователи надеются, что им удастся расширить способности своего творения так, что оно станет полностью автономным в будущем.
Полет фантазии
Еще один летающий робот, AirBurr, разработанный Жаном-Кристофером Зюфри из Политехнической школы в Лозанне, построен иначе. Внешне он совсем не напоминает насекомое, но ведет себя именно как насекомое. Это проявляется, в частности, в том, как он справляется с препятствиями. Вместо того, чтобы всеми силами избегать их, он может быстро восстановиться после случайного столкновения со стеной и лететь дальше. Для этого его слезоподобное крыло и маленькие пропеллеры защищены гибкими стержнями, которые принимают на себя удар, а сам робот сбалансирован так, что даже если он падает на землю, то всегда пропеллером вверх, чтобы сразу же снова сняться в воздух. Этим он напоминает надоедливую букашку, которая летает себе по вашей комнате, невзирая на все попытки остановить ее мухобойкой.
Вывод из этого исследования таков, что робот не обязательно должен выглядеть как животное, чтобы имитировать его поведение. Роботы будущего, возможно, будут напоминать средневековых монстров: головы землероек, щупальца осьминога, тело миноги. Но скорее всего, разработают не универсальные, а специализированные устройства, которые будут сотрудничать между собой: разведывательные летательные работы передавать информацию наземным или водным работам, каждый из которых будет выполнять свою особую задачу. Вместе они будут образовывать, можно сказать, роботоекосферу.
- Источник(и):
-
1. topwar.ru
- Войдите на сайт для отправки комментариев
