Рыба-робот с мозгом от смартфона
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Плавающий подводный робот с сенсором, выполняющим функцию боковой линии у рыб, разработан при участии ученых из Латвии и Эстонии. Теперь роботы могут правильно управлять своим движением под водой, экономично расходуя энергию, а в аквариумах появятся искусственные рыбы, точнее имитирующие поведение настоящих.
Разработкой робота занималась междисциплинарная группа, состоящая из ихтиологов (Университет Бата, Великобритания), специалистов по подводной робототехнике (Таллиннский университет технологий, Эстония), машиностроению (Рижский технический университет, Латвия), сигнальному анализу и перцепции потока (Университет Вероны, Италия) и сенсорных технологий (Итальянский институт технологий), в рамках финансируемого ЕС проекта FILOSE (Robotic Fish Locomotion and Sensing), целью которого является создание плавающих подводных роботов-биомиметиков, то есть роботов, в конструкции которых используются идеи, почерпнутые у живой природы.
Научить плавающего робота управлять своими движениями под водой в условиях постоянно меняющейся гидродинамической обстановки — весьма нетривиальная задача как с математической, так и с чисто инженерной точки зрения.
- Во-первых, нужно снабдить робота чувствительными сенсорами для измерения динамических характеристик жидкости, в которую он погружен (направления и скорости потока, различных параметров турбулентности и т. д.).
- Во-вторых, разработать оперативные алгоритмы, с помощью которых робот будет формировать оптимальные (в том числе с точки зрения энергозатрат) моторные команды для передвижения внутри потока.
- В-третьих, научить его быстро корректировать поведение при мгновенных изменениях гидродинамической обстановки, которые постоянно случаются в естественной среде.
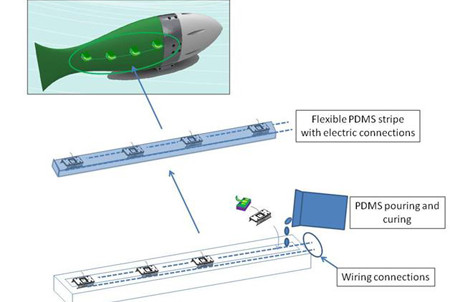 Рис. 1. Запаянные в полимер пьезосенсоры собраны в гибкие ленты, которые крепятся на корпус робота.
Рис. 1. Запаянные в полимер пьезосенсоры собраны в гибкие ленты, которые крепятся на корпус робота.
Для успешной ориентации под водой эволюция снабдила рыб, ракообразных, моллюсков и некоторых земноводных специальным органом — боковой линией, состоящей из чувствительных рецепторов, воспринимающих движения, даже самые незначительные, окружающей жидкости. Рецепторы боковой линии состоят из нейромастов — групп волосковых клеток, находящихся в желеобразном пузырьке — купуле. Нейромасты отвечают за преобразование механических колебаний, улавливаемых отростками клеток — стереоцилиями — в нервные импульсы.
Итальянская часть команды FILOSE, отвечающая за разработку сенсоров, сконструировала электромеханический аналог рецепторов боковой линии на основе микрорычагов из нитрида алюминия — пьезоэлектрика, преобразующего механическое давление в электрический импульс (см. рис).
Микросенсоры, расположенные на поверхности робота, улавливают малейшие изменения скорости потока, омывающего поверхность робота. У него таких сенсоров 64, сигналы с них передаются в головную часть устройства на 64-канальный аналого-цифровой преобразователь. Обработка сигналов осуществляется ARM9 (микропроцессором, на котором работает сейчас большинство смартфонов) посредством открытого программного кода и операционной системы Linux.
Положение робота контролировалось посредством гибкого хвоста, управляемого расположенным в брюхе сервоприводом.
 Рис. 2. Команда FILOSE объединила исследователей из Италии, Латвии, Эстонии и Великобритании.
Рис. 2. Команда FILOSE объединила исследователей из Италии, Латвии, Эстонии и Великобритании.
При создании рыборобота в качестве живой модели разработчики выбрали радужную форель — сильную стремительную рыбу, которая передвигается в воде, изгибая ⅔ задней части своего тела, в то время как ее передняя часть остается неподвижной.
Эксперименты показали, что робот-форель способен плыть вперед, застывать на месте, плыть по течению, отыскивая энергетически оптимальные сценарии движения внутри потока, а также использовать турбулентные возмущения для более быстрого продвижения вперед.
Имитирующие рыб роботы-биомиметики — популярное направление в робототехнике, востребованное как индустрией развлечений, так и фундаментальной наукой, изучающей нейромоторные механизмы поведения животных.
Разработка FILOSE наделяет таких роботов новой функцией, позволяющей им лучше адаптироваться к окружающей среде и эффективно расходовать энергию — необходимое условие для успешного «выживания» робота под водой в условиях постоянно меняющейся гидродинамической обстановки.
В отличие от роботов-рыб, продемонстрированных на EXPO-2012 в Сеуле в аквариуме со стоячей водой и довольно натурально имитирующих аквариумных рыб, роботы с боковой линией более «умные» и умеют адаптироваться к подводным течениям — ранее непреодолимому препятствию для более примитивных биомиметиков.
Коллективная статья разработчиков с описанием технологии, позволяющей роботу контролировать свои движения посредством боковых сенсоров, опубликована в Proceedings of the Royal Society A.
Автор: Дмитрий Малянов.
- Источник(и):
- Войдите на сайт для отправки комментариев
