Сложить и расправить. Искусство оригами в робототехнике
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Автор: Олег Сивченко. Не так давно на Хабре вышла новость о разработке червеобразных мягких роботов, которые легко меняют форму и длину для проникновения в труднодоступные места. Подобный робот – не только миниатюрное, но и высокотехнологичное устройство, оснащенное датчиками и серьезно адаптирующее свои функции к меняющимся условиям окружающей среды.
Такое бионическое направление развития робототехники логично и ожидаемо, но, в то же время, оно перекликается с не менее интересным феноменом модульной робототехники. Модульный робот автоматически собирается из относительно простых единиц, которые могут сами добираться до точки стыковки, ориентируясь на разметку в помещении, например, на складе.
Интересующимся модульной робототехникой я рекомендую посмотреть диссертацию и научные работы Никиты Павлюка, познакомившего меня с этой темой.
Здесь я затрону тему модульных роботов лишь в качестве контекста, подчеркнув их важнейшую черту – способность к реконфигурации. Шагом вперед от реконфигурации мне видится реализация приемов оригами в робототехнике, о чем я и расскажу далее.
Реконфигурируемые модульные роботы и роботы-оригами
Модульная робототехника изучает целое семейство робототехнических систем, состоящих из мелких взаимосвязанных единиц-модулей, соединяемых через стыковочные интерфейсы. Эти роботы состоят из относительно простых и самодостаточных блоков, каждый из которых оснащен собственными датчиками, исполнительными механизмами и вычислительными средствами. Но наиболее существенны в их конструкции именно интерфейсы, через которые группы этих блоков могут сочленяться в более крупные или многофункциональные структуры.
Роботов, обладающих такой возможностью, называют «самореконфигурируемыми», где самореконфигурироемость – это обратимый процесс, при котором дискретные единицы группируются друг с другом, и это делается без внешнего управления. Модульные роботы значительно выигрывают у жестких в функциональном и экономическом отношении. Поскольку такой робот может изменять форму, перераспределяя собственные детали, он адекватно приспосабливается к изменениям окружающей среды. Например, к исходной конфигурации модульного робота можно добавлять специализированные единицы, нужные для выполнения поставленной задачи: например, захваты, аккумуляторы или видеокамеры.
В структурном отношении простой модульный робот наиболее похож на змейку Рубика, состоящую из большого количества блоков:
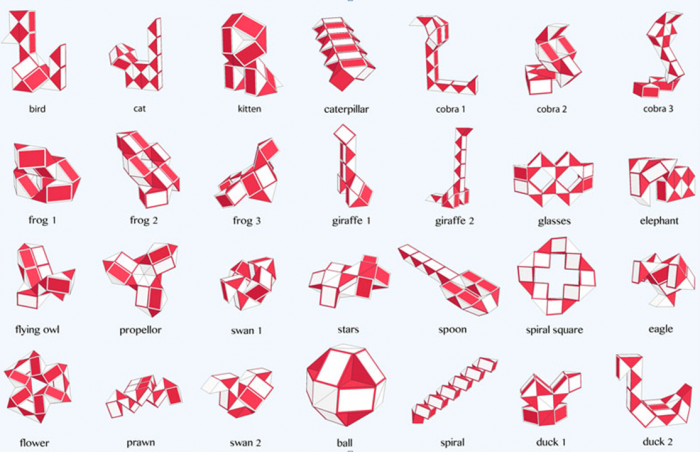
Процесс сбора элементов модульным роботом можно сравнить с электронной игрой в «змейку». Змейка достраивается поблочно и с ростом количества блоков все более разнообразны варианты ее реконфигурации на плоскости. Этот же пример со змейкой выдает важную уязвимость модульных роботов: чем больше однотипных элементов в такой конструкции, тем сложнее ее конфигурировать и тем сложнее роботу действовать в тесной или загроможденной среде. Если робот должен действовать в среде, малодоступной или непригодной для человека, то и управлять роботом придется удаленно, и исправить ошибки (ре)конфигурации будет затруднительно. Поэтому реконфигурируемым модульным роботам не хватает пластичности, характерной для мягких роботов, упомянутых в начале этой статьи. В свою очередь, мягкие роботы не отличаются прочностью и не умеют реконфигурироваться.
Именно поэтому в робототехнике оказался перспективен подход оригами. Роботы, устроенные по принципу оригами, могут быть модульными, но при этом настолько гибкими, что не уступают мягким роботам при работе в сложной окружающей среде.
Это автономные машины, чьи морфологические и функциональные свойства достигаются путем образования складок. Корпус оригами-робота состоит из множества динамических складок, благодаря совместной работе которых машина приводится в движение. Оригами-роботам присуща особая пластичность, поскольку они одновременно обладают свойствами жестких и мягких роботов. Такой подход к сборке роботов можно считать нисходящим, тогда как для робототехники в целом характерен восходящий принцип: мельчайшие узлы и сочленения постепенно собирают в более крупную структуру (что требует не только участия человека, но и времени, усилий и опыта).
Подход оригами одновременно упрощает проектирование и сборку роботов. При традиционном подходе для сборки робота требуется сложная система креплений и монтажных средств, специфичных для каждой собираемой модели, тогда как оригами – это выкладка нужных деталей на плоскости с последующим складыванием их в нужную форму. В таком случае удается быстро создавать, тестировать и дорабатывать весьма сложные формы. Также при использовании метода оригами возможна быстрая реконфигурация сборочных линий.
Робот Mori
Наиболее известным модульным роботом-оригами является Mori, собранный в Политехнической Школе Лозанны в 2016 году.
 Робот Mori
Робот Mori
«Mori» — это сокращение от «modular origami robot». Каждый треугольный элемент робота оснащен собственными элементами питания и датчиками:
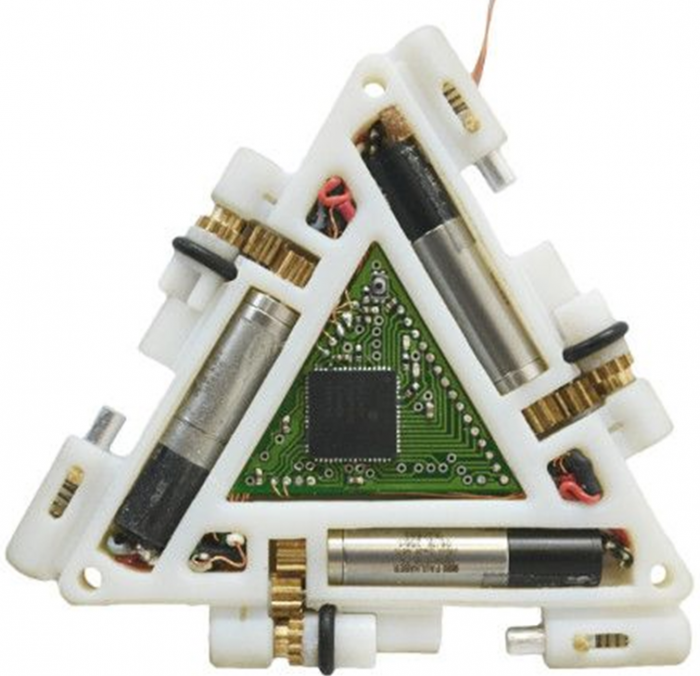
Длина такого элемента – всего 70 мм, толщина – 6 мм, вес – 26 г. Mori поддается дистанционному управлению:
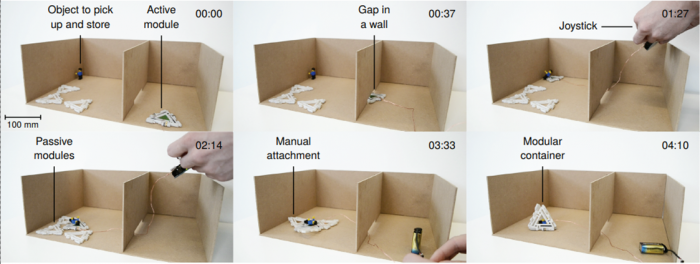
Здесь модуль управляется из соседнего помещения через прорезь в стенке и сам подхватывает объект, находящийся вне досягаемости пользователя. Затем первый модуль подбирается еще к трем модулям, подцепляет их по команде пользователя, после чего четыре модуля складываются в «контейнер», представляющий собой правильный тетраэдр. Поскольку все элементы Mori идентичны, они не только хорошо подгоняются друг к другу, но и могут образовывать прочную «решетку» правильной формы.
Разработка роботов-оригами тесно сопряжена с созданием умных материалов для них. Во-первых, такой материал должен реагировать на показания датчиков, встроенных в модуль; например, сигналом к началу сборки может стать повышение температуры материала или показания датчика приближения (proximity sensor). Для роботов-оригами особенно нужны пьезоэлектрические материалы и материалы с функцией запоминания формы (shape memory).
Рассмотрим их подробнее.
Роботы-оригами для реального использования
Пьезоэлектрические материалы изменяют форму в ответ на прилагаемый к ним электрический ток. Характерный пример – керамический перовскит, обеспечивающий движение оригами-микроботов. Несмотря на малый радиус действия, пьезоэлектрические исполнительные механизмы хорошо управляют складчатыми передачами, благодаря чему робота-оригами можно сделать ходячим и даже летающим. В таких системах сравнительно немного степеней свободы, но в миллиметровом масштабе электромагнитные приводы такого рода неэффективны, поэтому предпочтение все чаще отдается пьезоэлектрическим.
Сплавы с эффектом памяти формы (SMA). Это умные материалы, чья форма меняется в ответ на изменение температуры. Целевая форма детали задается и «усваивается» при нагревании до высокой температуры. После охлаждения и последующего нагревания до температуры перехода, более низкой, чем «учебная», деталь принимает заданную форму. Именно так и реализуется изменение форм по принципу оригами. Принцип сохраняется и при интеграции таких сплавов в композитные материалы. Через листы и плоские элементы робота можно пропускать витые провода из SMA, при воздействии на которые робот меняет форму и двигается.
Кроме сплавов эффектом памяти формы также обладают некоторые полимеры (полиолефин, полистирен), в целом обладающие более широким (по сравнению со сплавами) диапазоном настраиваемых параметров, например, рабочего напряжения и рабочих температур. «Учебная» температура аналогичных сплавов может достигать 300 °C, а у полимеров или материалов из углеволокна остается в пределах 200 °C. При этом полимерам также более удобно придавать заданный паттерн и дешево производить. Правда, пластичность некоторых из таких полимеров оставляет желать лучшего – для возврата детали в исходное состояние после работы может потребоваться дополнительное внешнее воздействие. Чтобы достигать в таких случаях двунаправленную, а не однонаправленную пластичность, предпринимаются попытки конструировать оригами-роботов на основе диэлектрических эластомеров и гидрогелей.
Армирование благородными металлами
В целом описанные материалы хороши для прототипирования оригами-моделей. Если говорить об оригами-роботах для промышленного использования, очевидно, что гибкости и легкости недостаточно. Такие роботы должны включать металл, который будет обеспечивать не только механическую прочность, но и электрическую проводимость и, соответственно, упростит обмен данными между модулями.
Оказалось, что непросто подыскать материал, который был бы пригоден для техники оригами, но при этом легко инкорпорировал бы атомы металлов. Для этой цели отлично подошел оксид графена (GO). Как известно, листы графена обладают нанометровой толщиной, поэтому складываются, сгибаются и принимают волнообразную форму, не разрушаясь ни при изготовлении, ни в динамике. В такие листы удалось включить атомы платины, золота и серебра.
Когда оригами-робот приобретает подобный металлический «скелет», его функциональные возможности значительно расширяются: робот приобретает тензочувствительность и способность к беспроводной телекоммуникации. Шаблон для металлизированного модуля такого рода изготавливается из целлюлозы, затем покрывается оксидом графена, далее в него добавляются нанокристаллы благородного металла, образец прокаливается в аргоновой атмосфере и, наконец, обжигается:

Наряду с прочностью требуется обеспечить гибкость такого элемента. Для этого целлюлозно-платиновый образец удобно постепенно пропитывать эластомером, например, полидиметилсилоксаном (ПДМС).
Такие платиново-эластомерные оригами можно категоризировать как реконфигурируемые метаматериалы, способные послужить многофункциональным каркасом при изготовлении мягких роботов. Изменения формы, достигнутые роботом, сохранялись при линейном напряжении. Кроме того, проводящие платиново-эластомерные оригами обладают тензочувствительностью, даже без интеграции датчиков. Сам скелет робота действует как тензочувствительный датчик и позволяет отслеживать движения робота в режиме реального времени. Плоский целлюлозно-платиновый элемент сохраняет проводящие свойства (на уровне микроволокон) при сгибе до 60°, а при сгибе до 90° трескается.
Применение
Образование и игра. Складывание оригами привычно воспринимается как игровая активность, поэтому роботы-оригами привлекательны для детей и подростков. Материалы, рассмотренные в начале этой статьи, в частности, целлюлоза, безопасны в обращении, они легкие и без труда упаковываются и доставляются клиенту. Поскольку роботы-оригами такие легкие, для движения им хватает слабого и несложного мотора, а управлять таким роботом удобно со смартфона.
Космонавтика. Как я упоминал выше, роботы-оригами особенно удобны для работы в условиях, непригодных для человека, например, в космосе и на Марсе или Луне. Оригами-робот может быть максимально компактно уложен в спускаемом модуле, а затем принять нужную форму уже по прибытии на место назначения. Кроме того, марсианский робот-оригами мог бы проникать в пустоты и пещеры, в которые не попадает привычный марсианский ровер типа Curiosity, либо компактно складываться при пыльной буре, либо свертывать и развертывать исполнительные механизмы в зависимости от решаемой задачи. Таков, например, спроектированный NASA робот PUFFER (Pop-Up Flat Folding Explorer Robot).
Медтехника. Роботы-оригами пришлись кстати в современной медицине, где все чаще требуются сложные миниатюрные устройства, пригодные для использования внутри человека. Например, предполагается, что робота можно будет заключать в растворимую капсулу, так, чтобы в ней он попадал в желудок и уже там развертывался.
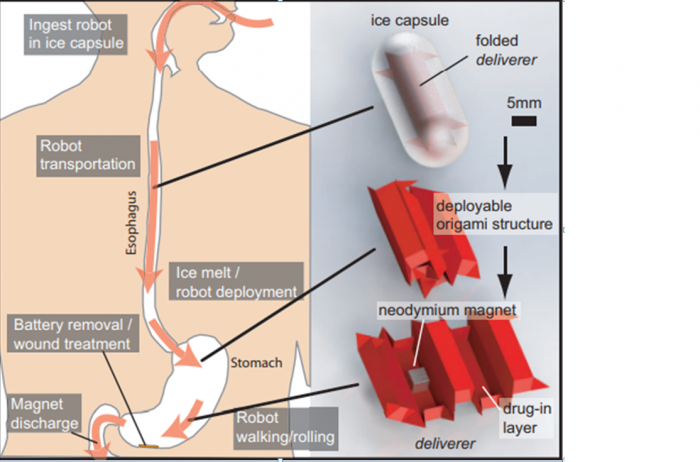
Такие роботы могли бы удалять из организма инородные тела, залечивать раны, либо прицельно доставлять лекарство к тому или иному органу, а также способствовать развитию хирургии без разрезов. Более того, раскрывающийся робот может расширить просвет кровеносного сосуда и почистить его от тромбов.
Раскладные солнечные панели. Отчасти этот вариант связан с вышеупомянутой возможностью использования оригами в космонавтике, но здесь техника оригами применяется к обширному составному зеркалу. Солнечная батарея может частично складываться или развертываться, реагируя на длину светового дня, на то, не занесло ли ее песком или снегом, а также сама стряхивать с зеркала снег, либо складываться при сильном ветре или в других опасных ситуациях. Кроме того, техника оригами позволяла бы тщательно контролировать угол наклона солнечных панелей.
Теоретически техника оригами могла бы обеспечить автономные метаморфозы робота; пока такие метаморфозы, которые позволяли бы роботу ситуативно менять функциональные возможности, затруднительны: ведь каждый узел робота обычно имеет строго конкретное назначение. Однако, если исполнительные механизмы робота могут меняться по принципу оригами, то робот может менять способ движения (например, ехать или ползти), менять форму захвата, регулировать силу и жесткость схвата, плыть, скользить и даже взлетать.
- Источник(и):
- Войдите на сайт для отправки комментариев
