Роботы ИТЭР
Широкая публика воспринимает проект ИТЭР прежде всего как набор штампов: “солнце в бутылке”, “100 миллионов градусов” и “чистая и неисчерпаемая энергия для человечества”. Но, порой остающиеся за кадром инженерные решения могут принести не меньше пользы, чем решение проблемы термоядерной энергетики. Например в области робототехники ИТЭР будет сложнейшим и самым передовым проектом в мире. Да-да, именно так.
 Роботы заваривают секцию тороидального магнита ИТЭР
Роботы заваривают секцию тороидального магнита ИТЭР
Необходимость обслуживания, ремонта, модификации этого крупнейшего в мире токамака людьми невозможно из-за высокого уровня радиации, который возникнет сразу после первых сеансов работы ИТЭР с термоядерным горением, из-за нейтронной активации, о чем я более подробно писал в прошлый раз.
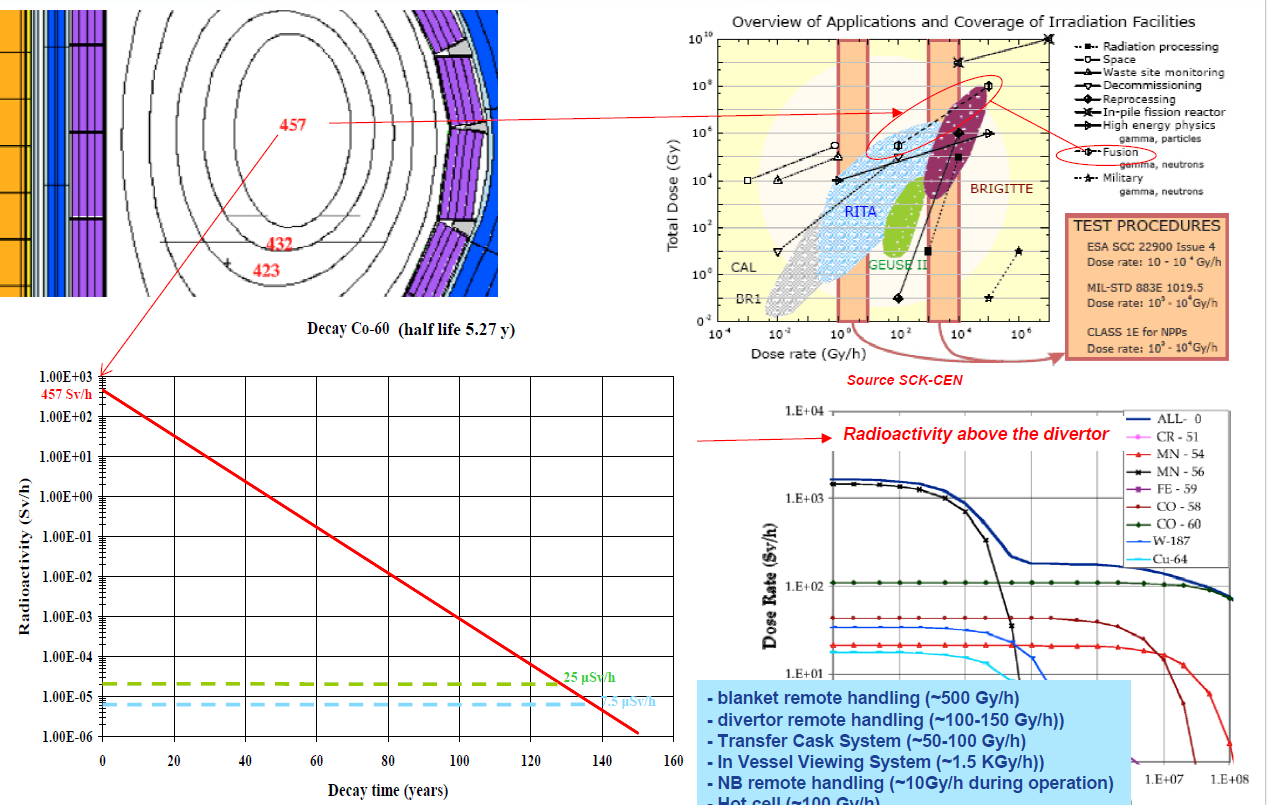 Мощность дозы внутри вакуумной камеры, в зивертах и ее динамика во времени.
Мощность дозы внутри вакуумной камеры, в зивертах и ее динамика во времени.
А значит все работы внутри тора и в непосредственной близости от вакуумной камеры (подробнее про вакуумную камеру, бланкет и дивертор, которые будут дальше постоянно встречаться в тексте), а так же в помещениях инжекторов нейтрального луча должны выполняться роботизированной системой, а точнее набором разнообразных систем. Кроме того, уже после запуска ИТЭР в постоянную исследовательскую работу будет достроено помещение горячих камер — для работы с извлекаемыми из реактора элементами конструкций, их починке, ремонту и обновлению. Основная проблема состоит именно в том, что все работа с абсолютно всем оборудованием, которое будет находится близко к плазме можно вести удаленно — либо в самом реакторе, либо вывозя его в горячие камеры. Забавно, кстати и то, что в токамаке темно, поэтому роботы вынуждены нести на себе еще и освещение.
Итак, давайте посмотрим, из чего будет состоять мощнейший комплекс дистанционного обслуживания термоядерного реактора ИТЭР. Всего он подразделяется на 7 систем:
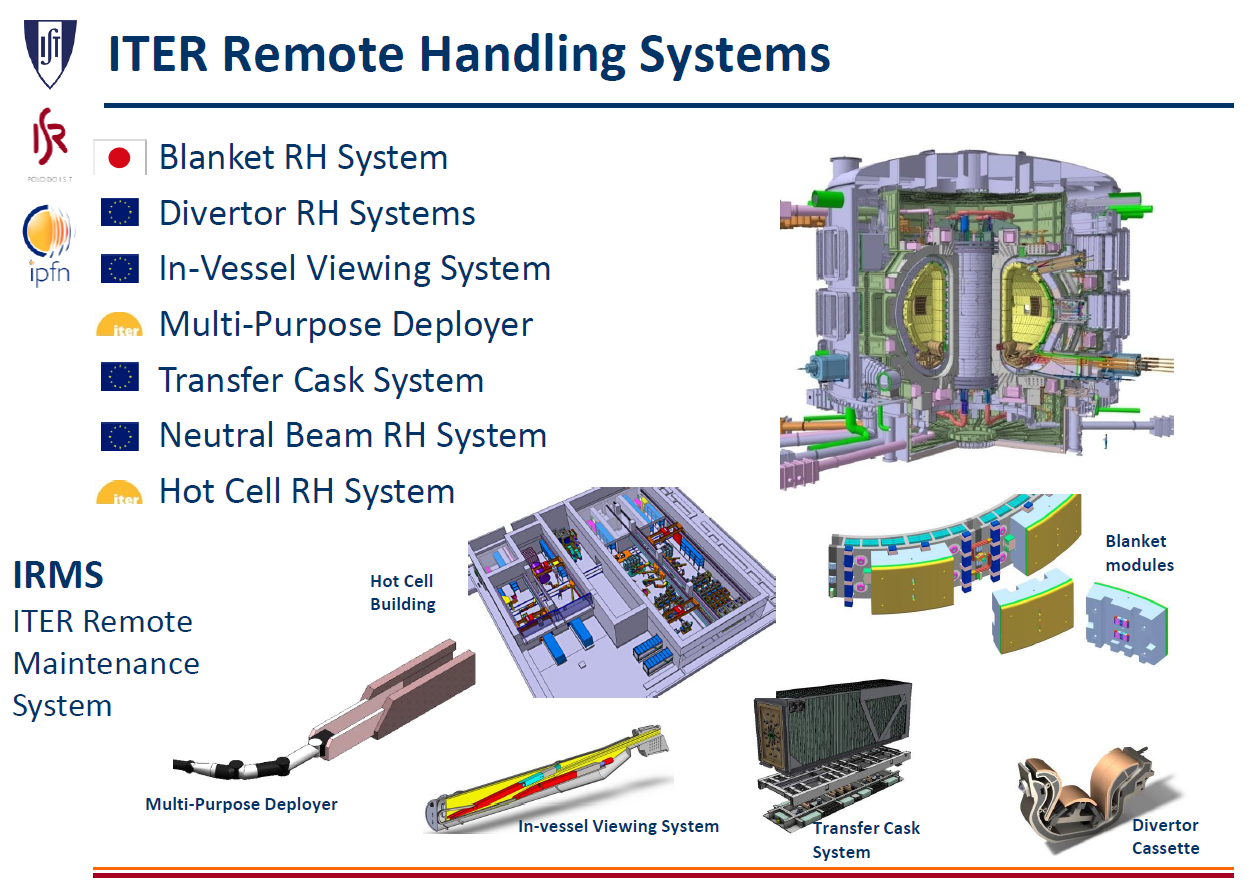
1. Описанная выше система дистанционного обслуживания в горячих камерах (HCRHS — hot cell remote handling), предназначенная для работы с активированными элементами ИТЭР вне самого реактора
 План одного этажа здания горячих камер. Видны пристыкованные транспортные контейнеры (синие)
План одного этажа здания горячих камер. Видны пристыкованные транспортные контейнеры (синие)
2. Автоматические транспортирующие контейнеры (или cask) и вставки портов (TCS — transfer cask system). В вакуумной камере сделаны 44 прохода — порта, на 3 уровнях. Оборудование, обращенное к плазме организуется в специальные модули — “вставки в порты”. Это позволит относительно быстро и модернизировать машину и чинить поломки, не останавливая реактор на месяцы. Кроме того транспортные cask’и будут доставлять и развертывать в реакторе все остальные робототехнические системы.

3. Система замены модулей бланкета (IVBT — In-Vessel Blanket Transporter ). Бланкет, который является экраном всей машины от излучения плазмы будет сменным. Как минимум первая стенка будет постепенно испаряться и повреждаться нейтронным излучением, и раз в примерно 5–10 лет ее необходимо заменять.
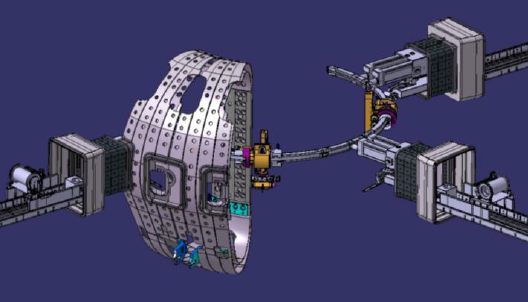 Развернутая через 3 порта IVBT (желтые элементы на сером рельсе)
Развернутая через 3 порта IVBT (желтые элементы на сером рельсе)
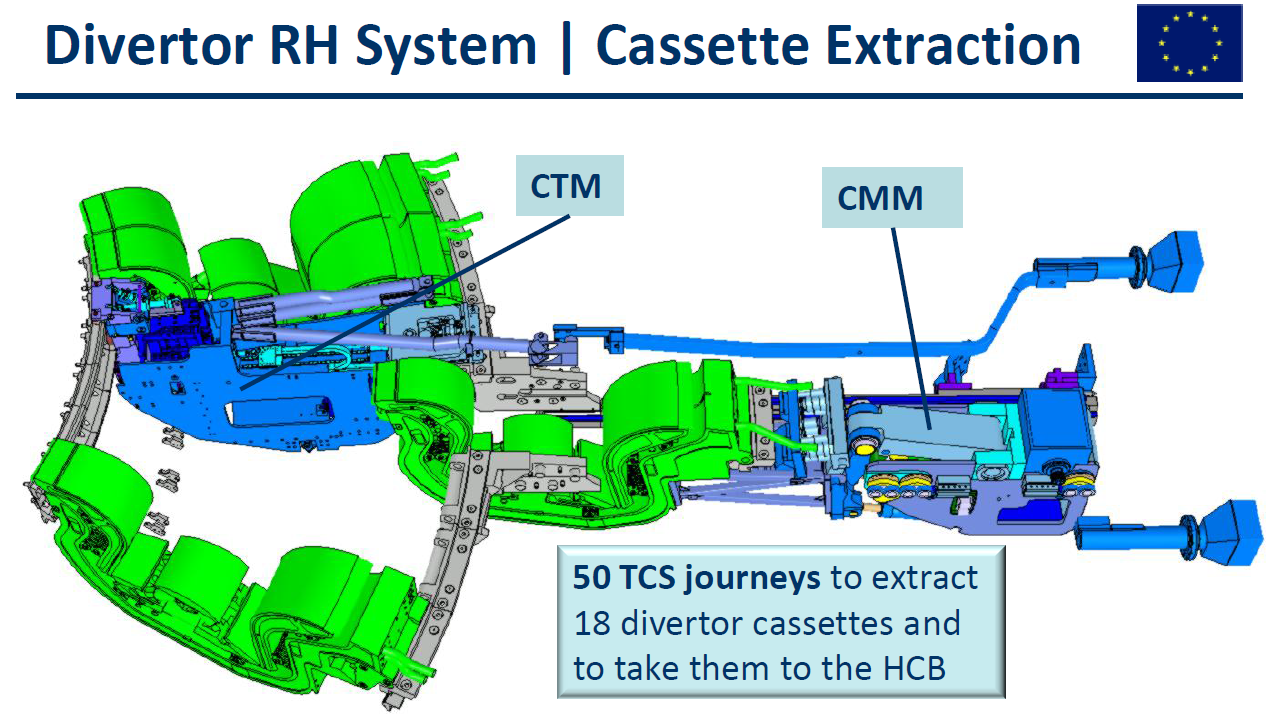
4. Аналогичная по функциям система замены модулей дивертора (DRH — Divertor remote handling). Дивертор — это часть бланкета, расположенная снизу, которая непосредственно касается плазмы, постоянно охлаждая и отбирая часть ее. Естественно, его износ будет еще серьезнее, и раз в 8–10 лет будет проводится замена всех 54 кассет дивертора.

5. Робот многоцелевого обслуживания вакуумной камеры (MPD — Multi-Purpose Deployer). Удаленно управляемый обслуживающий робот-манипулятор, развертываемый с транспортного контейнера. Его задача — устранять аварии, например разрывы трубок, проводить инспекцию элементов вакуумной камеры и т.п.
6. Система внутрикамерного зрения. (IVVS — In-vessel Viewing System) 6 манипуляторов с HD камерами и лазерными сканерами, которые базируются прямо в специальных карманах внутри вакуумной камеры для возможности быстрой инспекции.

7. Система обслуживания инжекторов нейтрального луча (NBSRH — Neutral beam System Remote Handling). Набор роботизированных кранов и манипуляторов для одной отдельной системы нагрева плазмы. К сожалению, эти 50 мегаваттные ускорители имеют общий объем с вакуумной камерой, а значит на их стенках будет оседать тритий, а на элементы их конструкции попадать энергичные термоядерные нейтроны. Отсюда необходимость удаленного обслуживания.
Прежде чем приступить к более подробному изучению всех этих роботов, необходимо упомянуть несколько проблем, стоящих перед разработчиками, которые затягивают сложность решений буквально в космос.
Во-первых, понятно, что всем этим системам придется работать в условиях высоких радиационных полей. Второй важный аспект — внутренности токамака — это высоковакуумное окружение, а значит никаких смазок, никаких гидравлических приводов с маслом. С такими ограничениями нужно создать механизмы, которые будут ставить, снимать и перемещать по сложным траекториям в узких пространствах большие многотонные блоки бланкета (до 4,5 тонн) и кассеты дивертора (9,5 тонн!) с высокой точностью и надежностью. Важнейшим аспектом становится взаимодействие одних робототехнических систем с другими — развертывать IVBT придется с 3-х транспортных caks’ов, пристыкованных к 3 разным портам, а тречить положение системы через IVVS. Подобные задачи в таких масштабах не приходилось пока решать никому в мире.
 Или вот например при установке диверторных кассет необходимо уметь с помощью роботов резать и сваривать трубопроводы охлаждения.
Или вот например при установке диверторных кассет необходимо уметь с помощью роботов резать и сваривать трубопроводы охлаждения.
Итак, давайте взглянем на системы подробнее. Начнем с транспортных контейнеров.
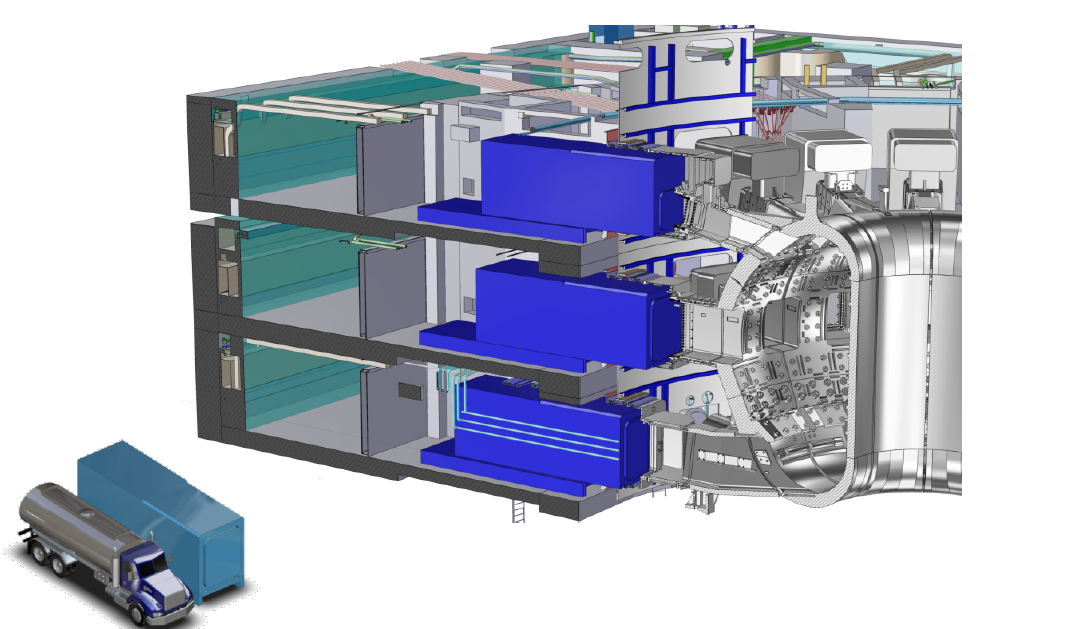 Транспортные контейнеры, подстыкованные на трех разных уровнях к портам вакуумной камеры.
Транспортные контейнеры, подстыкованные на трех разных уровнях к портам вакуумной камеры.
В комплексе ИТЭР будет здание горячих камер, где будет производится вся работа с радиоактивными компонентами, материалами и т.п. Оно непосредственно “пристыковано” к основному зданию токамака. Между портами токамака и горячими камерами будет курсировать 14 специальных автоматических механизмов, каждый размером чуть больше 20 футового контейнера. Они предназначены для перевозки всего, что будет вставляться и выниматься из портов токамака -модули научного оборудования, антенны систем нагрева плазмы, опытных элементов будущих термоядерных реакторов, роботов для развертывания внутри вакуумной камеры, наконец модулей бланкета и кассет дивертора.
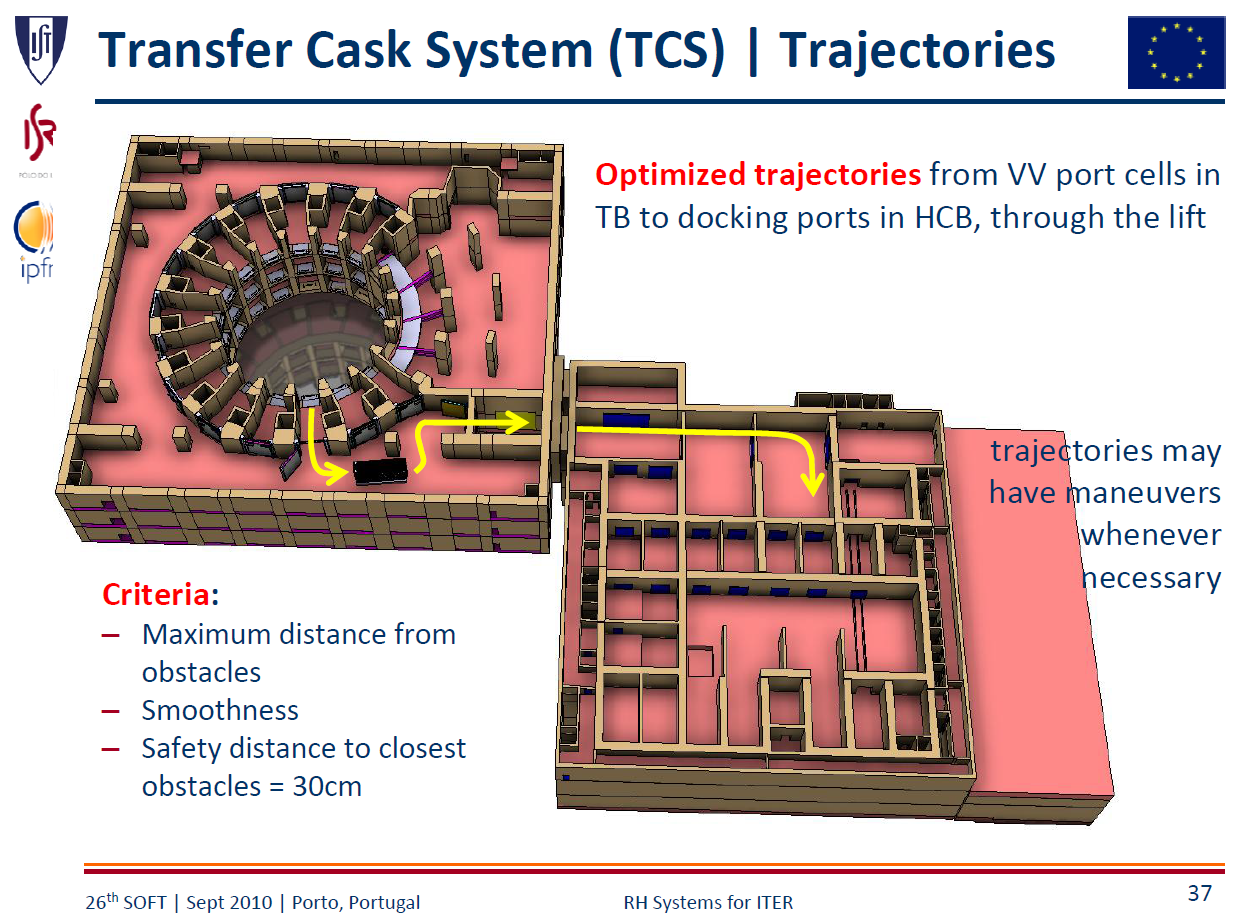 План зданий токамака и горячих камер и траектории движения контейнеров.
План зданий токамака и горячих камер и траектории движения контейнеров.
Забор груза осуществляется путем пристыковки передним интерфейсом контейнера к портам ИТЭР и вытягивания из порта элементов — вставок порта. Кроме того, к многим портам будут пристыкованы с внешней стороны промежуточные структуры, расширяющие объем для оборудования вставки порта. Они тоже будут перемещаться с помощью этой системы. Кстати, замена вставок портов — это не просто вставка кассеты. Кроме немаленькой массы (до 45 тонн!) и точности перемещения в единицы миллиметров необходимо уметь разрезать и сваривать трубопроводы, отключать электрические разъемы и и.п. Перемещаться cask’и скорее всего будут на воздушной подушке, снабжены двойными дверями, что бы скрывать при перемещении радиоактивную пыль внутри себя.

На данный момент к этой системе определены требования (есть вот такие интересные ролики, где исследуются траектории этих роботов внутри здания ИТЭР, и формулируются требования к их сенсорам), но конкретная инженерная проработка еще не начиналась и не выбран изготовитель — так что возможно внешний вид системы и поменяется. За разработку и производство отвечает Европейский союз.
Как мы помним, с нескольких подобных cask’ов будут разворачиваться системы обслуживания дивертора и бланкета. Японская система IVBT для обслуживания бланкета неуловимо несет в себе дух анимэ про гигантских роботов, если посмотреть на процесс разворачивания этого механизма:
Интересно, что за время разворачивания cask'и сделают 12 рейсов с разными частями IVBT.
Кроме головоломной механики системы у нее есть и другие сложности. Прежде всего это деформации системы под весом 4,5 тонного стального модуля бланкета.

Для достижения точности конечного эффектора этого робота в 2 мм (на базе 5 метров!) используется как связка виртуальная реальность/структурная симуляция, так и техническое зрение с разрешением 0,1 мм. Виртуальная реальность/структурная симуляция — это использование законов физики в виртуальной симуляции положения элементов робота, с моделированием их деформаций в реальном времени. В настоящее время такая виртуальная реальность, пользуясь данными с датчиков механики робота (энкодеров) достигла точности в 5 мм и 5 градусов по всем осям. Что бы еще улучшить ситуацию, эта виртуальная симуляция корректируется системой технического зрения, которая ориентируется на 3д модели модулей к которым подносится манипулятор. Это позволило довести ошибки позиционирования до 0,8 мм и 0,2 градуса.

Финальное позиционирование бланкета на креплениях будет осуществляться с помощью датчиков усилий в манипуляторе. Интересно, что для этого механизма довольно сложным оказалось создание системы развертывания — сматывания кабеля, т.к. общая длина от cask’а с кабелем до манипулятора может достигать 40 метров.

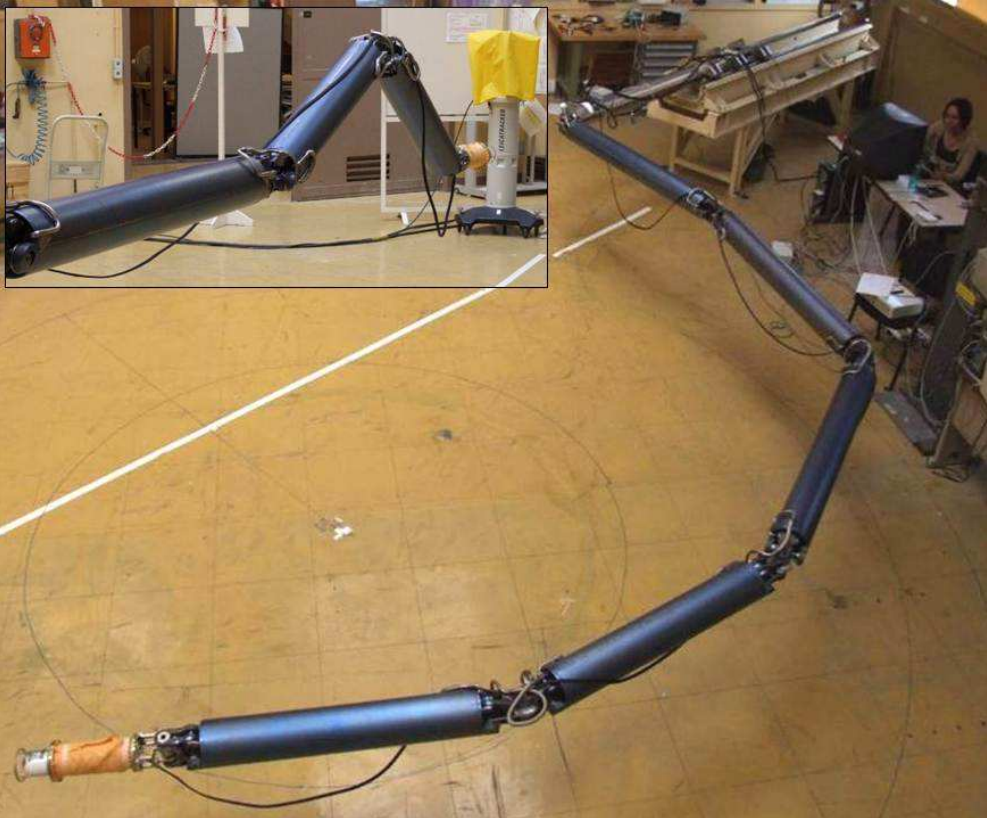
Впрочем, если для японской системы ключевой является обеспечение точности на сложной стенке двойной кривизны вакуумной камеры при размахе операций в десятки метров, то для системы замены диверторных кассет, разрабатываемых в финском университете в Тампере бОльшей проблемой является очень небольшие зазоры диверторного порта, в котором необходимо проводить кассету и тело робота (система состоит из двух субъединиц — Cassette multifunctional mover (CMM), двигающего кассеты через порт и Cassette toroidal mover (CTM), занимающегося перемещением кассет вдоль дивертора) — не больше 10–15 мм.

Точно так же здесь используется виртуальная реальность со структурной симуляцией. Для разработки этой системы в центре VTT в Финляндии построен специальный макет части токамака, на котором отрабатываются операции. Интересно, что для зажатия кассет в корпусе вакуумной камеры, для приварки труб охлаждения и других мелких операций используется встроенный в CMM/CTM манипулятор на водяной гидравлике — наилучшим образом совместимый с радиационно-вакуумным окружением токамака, но довольно медленный. Для этой системы характерен большой объем отработки на специальном тестовом стенде, что позволило довести значительную часть техники, программного обеспечения и операций до готовности к применению в ИТЭР.
Шикарная симуляция работы CTM по установке кассеты, начиная с извлечения из cask'a
И небольшое видео с кадрами работы системы на тестовой платформе
Вообще, надо заметить, что робототехнические операции подобной сложности будут очень не быстрыми. За замену 54 кассет дивертора отводится год, на замену всего бланкета — полтора. Правда, заметную роль в таких затяжках играют сроки замораживания-размораживания сверхпроводящих магнитов — 2 месяца что бы перейти от состояния “плазменные операции” в “возможно обслуживание” и обратно.
 Прототип инспекционной системы IVVS — Робот AIA
Прототип инспекционной системы IVVS — Робот AIA
Для того, что бы не ждать месяц для доступа манипулятором внутрь, французкое агенство CEA разрабатывает инспекционного робота AIA, способного работать при температурах от –50 до 170 С, ультравысоком вакууме и при радиационных полях до 50 тысяч рентген в час. Этот манипулятор несет камеры высокого разрешения и лазерный трекер, а в будущем — масс-спектрометр для поиска даже самых незначительных утечек из многочисленных трубопроводов охлаждения и лазерно-индуцированный оптический спектрометр для изучения осаждений на стенках вакуумной камеры.
 Прототип лазерного трекера для IVVS
Прототип лазерного трекера для IVVS
6 подобных манипуляторов, расположенных в специальных хранилищах по периметру вакуумной камеры составят систему внутреннего обзора IVVS. Ее можно будет развернуть внутрь в любой момент (кроме как во время горения плазмы :)) для инспекции повреждений. Точность разрешения камеры должна быть не хуже 1 мм на дистанции в 4 метра и 3Д сканирование с точность 0.165 мм
 AIA развернутый во время испытаний в токамаке Tore Supra в высоковакуумных условиях при температуре стенок 120 С.
AIA развернутый во время испытаний в токамаке Tore Supra в высоковакуумных условиях при температуре стенок 120 С.
.[image]
Если инспекции, проведенные с помощью IVVS покажут необходимость ремонтов, то в игру вступит телеуправляемый робот MPD.

Разрабатываемый английской компанией Oxford Technologies он является обновленной версией робота обслуживающего токамак JET. Его задачи, кроме ремонтов — настройка и калибровка внутренних частей научного и инженерного оборудования токамака, а так же немаловажная задача — сбор радиоактивной пыли, которая образуется в результате воздействия термоядерной плазмы на поверхности вакуумной камеры. Еще одной немаловажной задачей MPD является спасательные операции для других робототехнических систем в случае их отказа.

При длине манипулятора 8 метров максимальная полезная нагрузка должна составлять 2 тонны. Как и в версии робота для JET на MPD будут размещены 2 телеуправляемых манипулятора с обратной связью, несколько камер и лазерных радаров. Интересно, что для этого робота уже разработано множество “ручных” инструментов для резки-сварки труб, монтажа-демонтажа различного оборудования, инспекций и исследования.
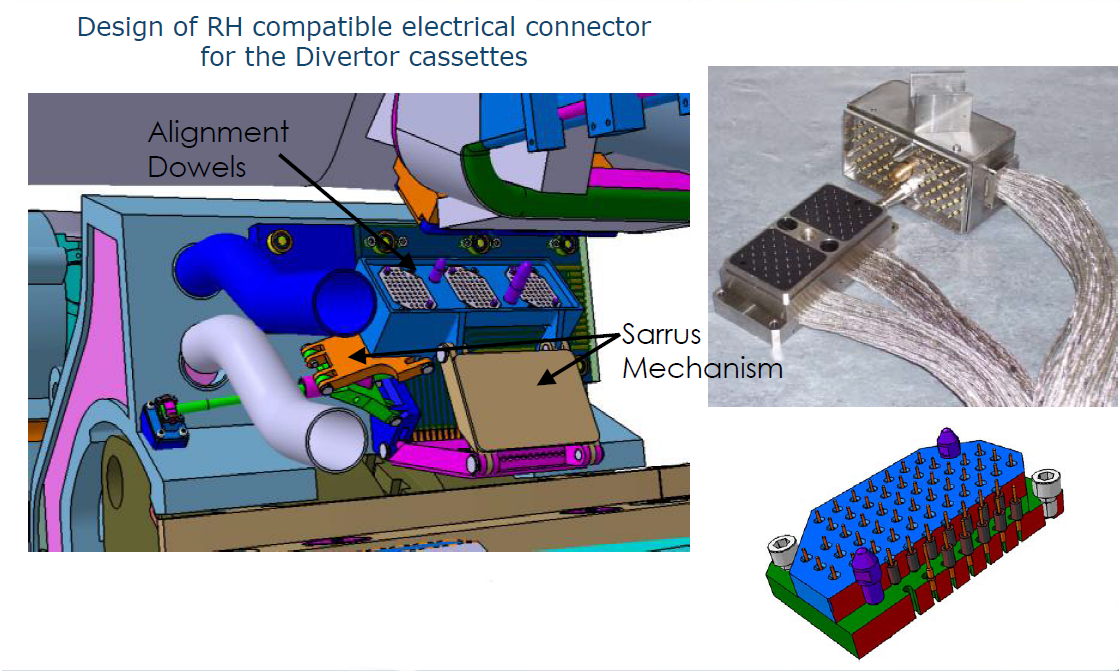 Или, например готовые к установке манипулятором CMM/CTM разъемы диверторных кассет — тоже разработка Oxford Technoligies
Или, например готовые к установке манипулятором CMM/CTM разъемы диверторных кассет — тоже разработка Oxford Technoligies
Кроме самой вакуумной камеры, в регулярном дистанционном обслуживании нуждаются и инжекторы нейтрального луча. Для этого в помещении NBI (где изначально будет размещено 2 силовых и 1 диагностический NBI) будет расположено несколько схожих с MPD роботов с телеуправляемыми манипуляторами, а так же специальные краны, перемещающийся по монорельсовой системе под потолком, способные поднимать и заменять самые тяжелые компоненты NBI.
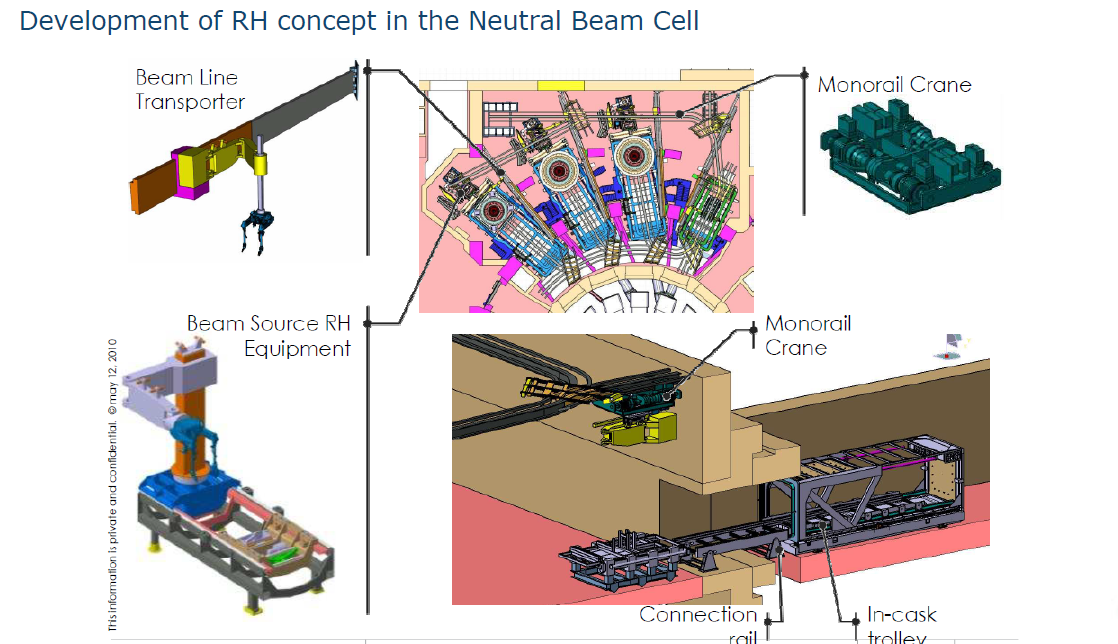 Общий план робототехнической системы NBI
Общий план робототехнической системы NBI
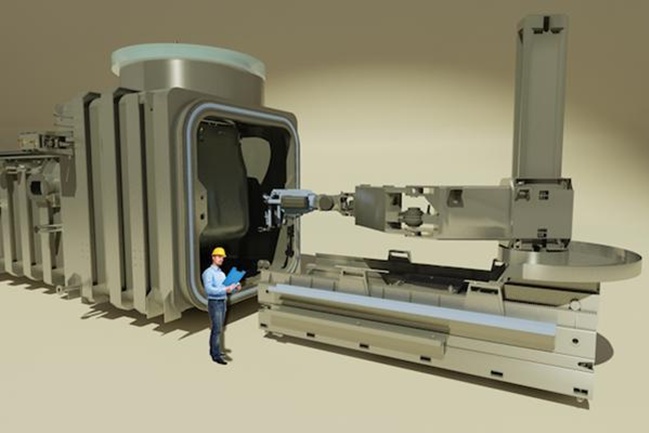 Рендер робота для обслуживания цезиевых печек и радиочастотных генераторов инжектора нейтрального луча.
Рендер робота для обслуживания цезиевых печек и радиочастотных генераторов инжектора нейтрального луча.
Что ж, во второй части статьи, после обзора робототехнических систем ИТЭР, мы поговорим про то, как дистанционное обслуживание влияет на конструктив токамака, идеологию и операции телеуправляемых операций такого масштаба. Так же я постараюсь затронуть тему перехода разрабатываемых технологий в промышленность, не связанную с термоядерными реакторами.
- Источник(и):
- Войдите на сайт для отправки комментариев
