Квадрокоптер обучили скалолазанию
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Исследователи из Стэнфордского университета создали прототип квадрокоптера, который способен садиться на вертикальные плоскости и карабкаться по ним. Подробнее об устройстве рассказывает IEEE Spectrum.
Квадрокоптер под названием SCAMP способен летать, а также висеть и ползать по вертикальным поверхностям без помощи роторов. При подлете к вертикальной плоскости дрон при помощи акселерометра определяет контакт с препятствием и два из четырех роторов начинают вращаться быстрее, «опрокидывая» беспилотник в вертикальное положение. Робот упирается задним упором и двумя ножками в стену, а роторы вращаются до тех пор, пока не исчезнут колебания — после этого беспилотник может отключить двигатели.
Для передвижения робот использует две ножки, на которых по очереди подтягивается. В контактных площадках ножек установлены металлические коготки, которые могут цепляться за малейшие неровности поверхности. В случае срыва беспилотник быстро реагирует включением роторов и, тем самым, предотвращает крушение, что выгодно отличает его от обычных ползающих роботов. После работы в вертикальном положении робот способен самостоятельно перейти обратно в режим квадрокоптера.
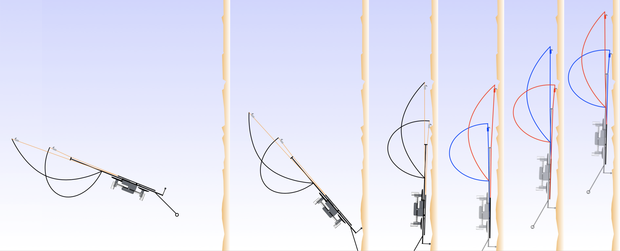 Схематичное изображение посадки на вертикальную поверхность и передвижения по ней. Stanford University
Схематичное изображение посадки на вертикальную поверхность и передвижения по ней. Stanford University
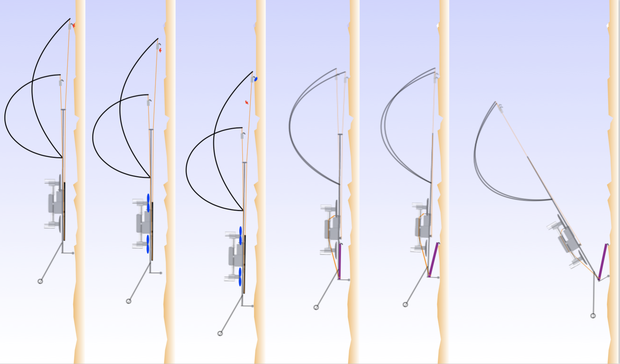 Схематичное изображение работы роторов при срыве и взлета с вертикальной поверхности. Stanford University
Схематичное изображение работы роторов при срыве и взлета с вертикальной поверхности. Stanford University
Такая схема работы, по словам авторов, позволяет значительно сэкономить заряд аккумулятора за счет отключения роторов. При этом посадка на вертикальную поверхность может быть критичным умением для беспилотника, работающего, например, в зоне стихийного бедствия — обрушившиеся строения затрудняют поиск ровной площадки для посадки обычного мультикоптера, в то время как стены зачастую частично сохраняются после обрушения здания.
Авторы особо отмечают, что большинство существующих беспилотников, способных к сложным маневрам, могут работать только в лабораторных условиях с дополнительной системой позиционирования или отдельным компьютером, управляющим полетом дрона. Однако квадрокоптеру SCAMP не требуется дополнительное оборудование — беспилотник может передвигаться как внутри помещений, так и на улице, опираясь при смене режимов передвижения только на сосбтвенные вычислительные возможности и показания бортовых датчиков.
Ранее разработчики уже демонстрировали возможность крепления подобной системы на беспилотник самолетного типа. По их словам, цепляющиеся за стены беспилотники идеально подходят для сбора данных при чрезвычайных ситуациях. Кроме сбора данных такие дроны могут нести на себе ретрансляторы для оперативного развертывания сотовой сети или сети передачи данных, при новый прототип может ползать по стене, что позволяет передвигать робота в поисках наилучшего положения для приема и передачи радиосигналов.
Ранее инженеры из Корейского института передовых технологий представили квадрокоптер, способный передвигаться по вертикальным поверхностям при помощи колес, на базе которого позже разработали прототип огнеупорного противопожарного квадрокоптера, способного передвигаться по стенам внутри горящего здания. Кроме KAIST разработкой ездящего по стенам робота с роторами также занимались специалисты из Disney Research.
Автор: Николай Воронцов
- Источник(и):
- Войдите на сайт для отправки комментариев
