Создан робот-паркурист с рекордным показателем вертикальной прыгучести
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Инженеры из Калифорнийского университета в Беркли сконструировали 100-граммового робота SALTO (SAtatorial Locomotion on Terrain Obstacles), который преодолевает многометровые препятствия, быстро прыгая в высоту по одному метру. Главная идея в том, что развиваемая во время прыжка мощность превышает мощность моторов робота. Идея накопления и высвобождения энергии (модуляция мощности) позаимствована в животном мире, а именно — у сенегальского галаго, маленького африканского зверька с большими глазами.
По примеру сенегальского галаго робот SALTO делает ряд последовательных прыжков, в том числе отталкиваясь от вертикальных стен, как в паркуре. Возможно, такие машины найдут применение в армии и МЧС.
Конструируя робота SALTO, учёные изучили животных с максимальной вертикальной прыгучестью. В природе есть всего несколько млекопитающих, способных прыгать на высоту более двух метров из состояния покоя, с возможностью немедленного повторения такого прыжка. Рекордсменом среди этих животных является сенегальский галаго (Galago senegalensis).
 Схема накопления энергии для модуляции мощности перед прыжком у робота SALTO. Иллюстрация: Калифорнийский университет в Беркли
Схема накопления энергии для модуляции мощности перед прыжком у робота SALTO. Иллюстрация: Калифорнийский университет в Беркли
Зверёк приспособлен к ночному образу жизни. Длина тела сенегальского галаго от 13 до 21 см, длина хвоста от 20 до 30 см. Вес составляет примерно от 200 до 300 г.
 Сенегальский галаго (Galago senegalensis)
Сенегальский галаго (Galago senegalensis)
Сенегальский галаго способен преодолевать вертикальные препятствия до пяти метров, используя уникальную систему прыжков, известную в литературе по биомеханике как модуляция мощности (power modulation) или амплификация мощности (power amplification). Этот термин означает, что мгновенная мощность, выдаваемая мускульно-сухожильным комплексом животного превышает максимальную силу его мышц. Такие «пружинные» комплексы обнаружены у разнообразных видов, в том числе хамелеонов, саламандр, морских игл, некоторых ротоногих и других животных.
В процессе модуляции мощности мышцы передают для накопления энергию в ряд эластичных структур, соединённых последовательно или параллельно. Затем эта энергия одномоментно высвобождается, так что общая отдача превышает силу одних только мышц. У робота для накопления потенциальной энергии используются пружины или резинки.
Расположение этих эластичных структур определяет порядок поступления энергии от приводов и способ её преобразования из потенциальной в кинетическую. Инженеры из Калифорнийского университета в Беркли поставили задачу разработать эластичный привод с последовательным соединением, который покажет максимальный показатель вертикальной прыгучести.
Вертикальная прыгучесть
Под вертикальной прыгучестью понимается частное высоты прыжка и суммы времени на подготовку прыжка и времени полёта до высшей точки. То есть вертикальная прыгучесть равна
h/(t1+t2)
Учёные замерили параметр вертикальной прыгучести у различных роботов и живых организмов. Результат измерения показан на графиках.
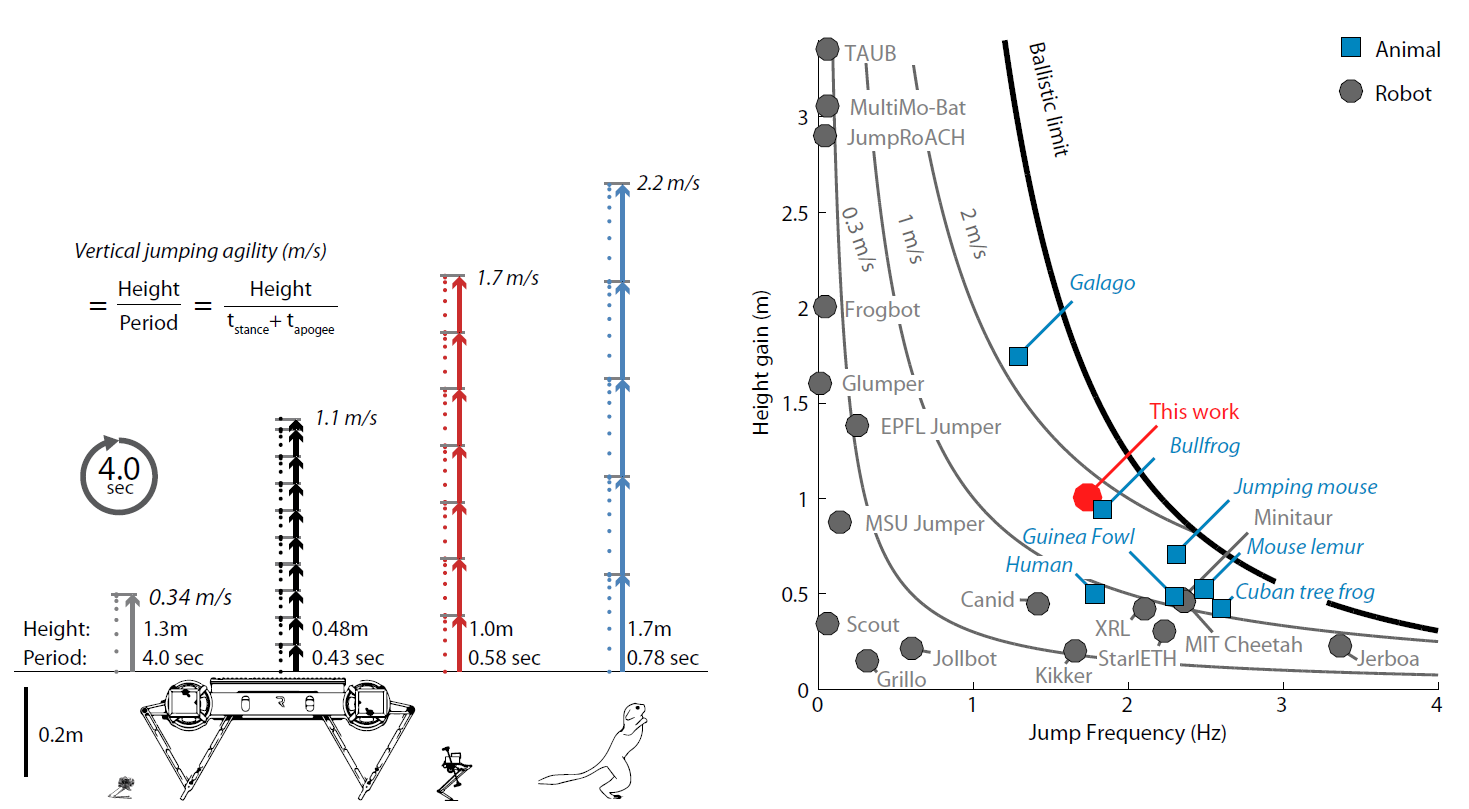
На левом графике отмечено, какую высоту способны одолеть за 4 секунды приводы разной конструкции с разной вертикальной прыгучестью. Например, параллельно-эластичный робот EPFL Jumper за 4 секунды прыгает один раз на высоту 1,3 метра, что соответствует показателю вертикальной прыгучести всего 0,34 м/с. У робота Minitaur этот показатель составляет 1,1 м/с. Наконец, у представленного в данной научной работе робота SALTO (отмечен красным цветом) вертикальная прыгучесть равняется 1,7 м/с. Каждый прыжок на метр занимает всего 0,58 с. Это значит, что за четыре секунды такой робот может заскочить почти на семь метров. Для сравнения, у живого сенегальского галаго вертикальная прыгучесть 2,2 м/с.
На правом графике видно, что у SALTO практически идеальное сочетание максимальной высоты и частоты прыжков. Именно за счёт такого идеального сочетания он демонстрирует рекордный показатель вертикальной прыгучести среди всех роботов в мире.
Предыдущим рекордсменом по этому показателю был Minitaur, гораздо более крупный и внешне довольно неуклюжий робот (прыжки на 48 см за 0,43 с). По абсолютной высоте прыжков рекорд удерживает израильский робот TAUB, сконструированный по образцу саранчи. У него высота прыжка 3,2 м.
Механику 26-сантиметрового одноногого SALTO можно попробовать применить в других роботах, в том числе в роботах с большим количеством ног, которые тоже используют эластичный привод с последовательным соединением. Это такие роботы как StarlETH, ANYmal и ATRIAS.
А представьте, что мощные «мускульно-сухожильные» комплексы как у SALTO поставят на робота-гуманоида вроде Atlas? С таким противником совсем не захочется столкнуться в тёмном переулке.
 Робот Atlas от Boston Dynamics
Робот Atlas от Boston Dynamics
Научная работа опубликована 6 декабря 2016 года в первом выпуске нового журнала Science Robotics (doi: 10.1126/scirobotics.aag2048). Исследование профинансировано Национальным научным фондом США и подразделением американской армии U.S. Army Research Laboratory в рамках научно-исследовательской инициативы Micro Autonomous Systems and Technology Collaborative Technology Alliance.
- Источник(и):
- Войдите на сайт для отправки комментариев
