Летающий робот помог объяснить полет дрозофил
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Нидерландские инженеры создали легкого летающего робота, который позволяет изучать механизмы, лежащие в основе полета насекомых. Несмотря на отсутствие хвоста он может управлять движением вокруг вертикальной оси с помощью движений крыльев, создающих крутящие моменты по остальным осям. Эксперименты с роботом позволили подтвердить гипотезу, согласно которой дрозофилы и некоторые другие насекомые используют аналогичный механизм во время резких поворотов. Статья опубликована в Science.
Насекомые умеют совершать крайне быстрые и точные маневры, помогающие им избегать опасностей или ловить добычу. Ученым, изучающим механизмы полета насекомых, и инженерам, стремящимся повторить их в искусственных устройствах, приходится полагаться на прямые наблюдения, а также разработанные на их основе теоретические модели и экспериментальные летательные аппараты. Некоторые разработки в области махолетов, использующих аналогичные насекомым механизмы, уже есть, но почти всегда их движения ограничены из-за проводов, недостаточно емкого аккумулятора или других факторов.
 MAVLab TU Delft / YouTube
MAVLab TU Delft / YouTube
Группа инженеров из Делфтского технического университета и Вагенингенского университета под руководством Гвидо де Кроона (Guido de Croon) создала исследовательского робота, способного автономно летать на протяжении пяти минут.
Он выполнен по схеме махолета с двумя парами крыльев, присоединенных к общему основанию. Размах крыльев робота составляет 33 сантиметра, а его масса — 28,2 грамма. Поскольку аппарат лишен хвоста, как и у насекомых управление направлением движения происходит исключительно с помощью крыльев.
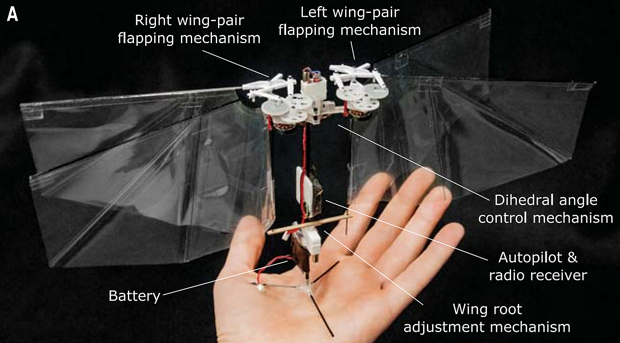 Компоненты робота. Matěj Karásek et al. / Science, 2018
Компоненты робота. Matěj Karásek et al. / Science, 2018
 Компоненты робота. Matěj Karásek et al. / Science, 2018
Компоненты робота. Matěj Karásek et al. / Science, 2018
Каждая пара крыльев приводится в движение отдельным мотором, соединенным с крыльями через несколько шестерней. Для управления крутящими моментами по трем осям инженеры использовали несколько механизмов. Крен (движение вокруг продольной оси) задается с помощью изменения частоты взмахов на одной из пар крыльев, что приводит к изменению тяги и наклонению робота в одну из сторон. Изменение тангажа (движение вокруг поперечной оси) происходит с помощью одновременного поворота верхней кромки пар крыльев относительно основания робота. За счет этого пары крыльев становятся расположены несимметрично и робот наклоняется в обратную сторону относительно них. Для управления рысканием (движением вокруг вертикальной оси) инженеры добавили в нижней части робота поворотный механизм, прикрепленный к нижним кромкам крыльев и позволяющий перенаправить вектора тяги пар крыльев в разные стороны.
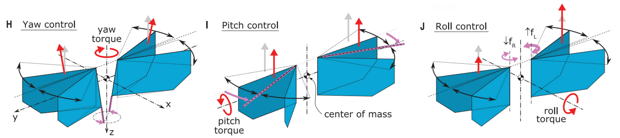 Механизмы создания движения вдоль трех осей. Matěj Karásek et al. / Science, 2018
Механизмы создания движения вдоль трех осей. Matěj Karásek et al. / Science, 2018
Инженеры решили продемонстрировать пригодность робота для изучения движений насекомых на примере исследования резких поворотов, которые дрозофилы совершают во время побега от хищников. В нескольких работах выдвигалась гипотеза, что эти маневры дрозофилы выполняют в две стадии. Во время первой фазы дрозофила поворачивает с помощью комбинации крутящих моментов вокруг продольной и поперечной осей, без использования вертикальной оси, а также, фактически, не контролирует направление из-за того, что информация от зрительной системы поступает недостаточно быстро. Во второй фазе она использует поступившую визуальную информацию для того, чтобы стабилизировать свое движение и компенсировать возникший «занос».
Во время экспериментов робот имитировал маневры дрозофил. Несмотря 55-кратную разницу в размере, скорости и перегрузки во время поворота были сопоставимы. Испытания показали, что робот с полностью отключенной функцией прямого управления движением вокруг вертикальной оси смог повторить описываемые в других исследованиях траектории полета дрозофил. Таким образом, исследователи показали, что дрозофилы могут использовать изменение тангажа и крена для создания крутящего момента, обеспечивающего поворот вокруг вертикальной оси.
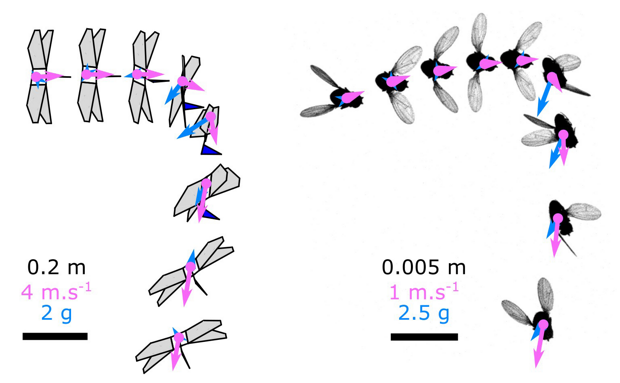 Сравнение параметров полета робота и дрозофилы во время маневра уклонения. Matěj Karásek et al. / Science, 2018
Сравнение параметров полета робота и дрозофилы во время маневра уклонения. Matěj Karásek et al. / Science, 2018
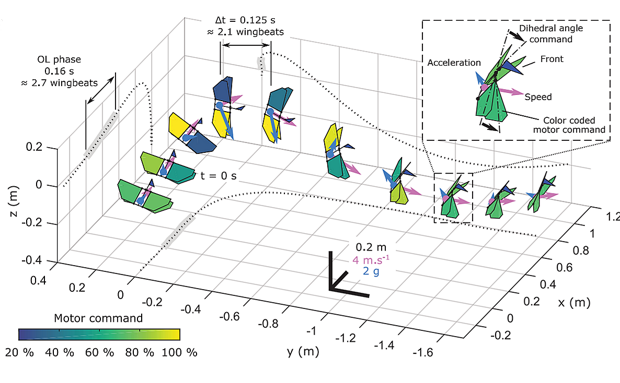 Модель полета робота во время маневра. Matěj Karásek et al. / Science, 2018
Модель полета робота во время маневра. Matěj Karásek et al. / Science, 2018
Также исследователи провели эксперименты с включенной системой поворота нижних кромок крыльев для управления рысканием, благодаря чему им удалось убрать «занос», возникающий в конце маневра и у робота, и у дрозофил. Тем не менее, скорость всего маневра от этого не увеличилась, что, по мнению исследователей, также косвенно указывает на то, что дрозофилы не применяют активный контроль движения вокруг вертикальной оси во время поворота.
Над созданием похожих на живые организмы крылатых роботов уже несколько лет работают инженеры из Гарвардского университета. Они создали робопчел, способных прилипать к листьям и нырять под воду и использующих для питания провод. А недавно они продемонстрировали полет полностью автономного робота массой 190 миллиграммов, получающего энергию от лазерного луча.
Автор: Григорий Копиев
- Источник(и):
- Войдите на сайт для отправки комментариев
