Устройство для управления тараканом научили собирать данные о его движениях
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Американские инженеры создали плату для управления движением таракана с помощью электростимуляции его усиков. В отличие от аналогичных разработок новая плата позволяет собирать информацию о перемещении жука и окружающей температуре. Разработка была представлена на конференции CCN 2018.
Существует достаточно много устройств, позволяющих управлять движением насекомых с помощью стимуляции нейронов. Как правило, для этого используется электрический ток с определенной частотой импульсов и напряжением, кроме того, существуют разработки, позволяющие активировать нейроны, воздействуя на них светом. Чтобы насекомое могло передвигаться с таким устройством оно должно быть достаточно легким и компактным, из-за чего пока существующие прототипы обладают только базовыми функциями, обеспечивающими управление.
Эван Фолкнер (Evan Faulkner) и Абхишек Дутта (Abhishek Dutta) из Коннектикутского университета создали устройство для управления мадагаскарским шипящим тараканом (Gromphadorhina portentosa), позволяющее собирать больше данных. В его основе лежит небольшой микроконтроллер с процессором, памятью и Bluetooth-передатчиком для получения команд и передачи собираемых данных. Кроме того, в устройстве есть потенциометр для изменения напряжения импульсов, а также измерительный блок для отслеживания перемещения таракана по шести осям и окружающей температуры, которая влияет на движения насекомого. Устройство получает питание от миниатюрного литиевого элемента питания.
 Abhishek Dutta / UConn
Abhishek Dutta / UConn
Разработчики провели первичные испытания устройства, прикрепив два электрода от него к основаниям усиков. Электрические импульсы с определенными характеристиками создают у таракана иллюзию того, что он врезался в препятствие, после чего он сдвигается в противоположную от препятствия сторону. Таким образом, при стимуляции правым электродом он сдвигается влево и наоборот.
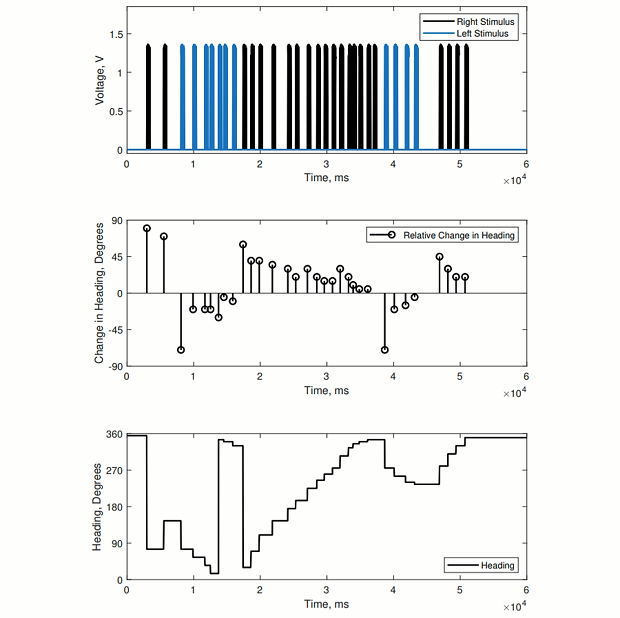 Электрические импульсы (верхний график) и изменение направления таракана (два нижних графика). Evan Faulkner, Abhishek Dutta / CCN 2018
Электрические импульсы (верхний график) и изменение направления таракана (два нижних графика). Evan Faulkner, Abhishek Dutta / CCN 2018
Инженеры отмечают, что получение данных о перемещении таракана в реальном времени позволит в будущем разработать автоматизированную систему, которая будет самостоятельно компенсировать отклонения и подавать импульсы таким образом, чтобы таракан перемещался в заданную точку.
Существуют и другие подходы к созданию устройств для управления движением насекомых. К примеру, в 2016 году инженеры создали систему электродов, которые имплантируются в каждую ногу жука и позволяют стимулировать сами мышцы ног, а не опосредованно управлять из сокращением через стимуляцию усиков и создание иллюзии препятствия. Благодаря стимулированию отдельных мышц разработчикам удалось добиться разной скорости передвижения и разных походок у насекомых.
Автор: Григорий Копиев
- Источник(и):
- Войдите на сайт для отправки комментариев
