NASA завершило конкурс на создание датчиков для венерианского ровера
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
NASA объявило о завершении конкурса на создание системы механических датчиков для будущего венерианского ровера AREE. Из 572 проектов были выбраны три финалиста, а еще 12 участников получили поощрительные призы. Победителем конкурса стал проект каирского архитектора, который предложил одеть колеса ровера в сетки, разместив перед ним систему из катков и трубок, сообщается на сайте NASA.
Условия на поверхности Венеры — высокие температура и атмосферное давление — крайне неблагоприятны для проведения долговременных исследований автоматическими аппаратами, использующими электронные компоненты. Рекорд продолжительности работы на Венере, поставленный в ходе проведения советской миссии (подробнее о ней можно узнать из материала «Дотянуться до Венеры»), составил 127 минут и до сих пор не побит.
В феврале 2020 года NASA объявило конкурс на создание датчиков для венерианского механического ровера AREE (Automaton Rover for Extreme Environments), первый этап разработки которого в рамках программы NIAC (NASA Innovative Advanced Concepts) завершился в 2017 году. По плану он будет получать и запасать энергию при помощи ветрогенератора и системы пружин, а управление будет осуществляться механическим компьютером, при этом детали аппарата будут изготавливаться из жаропрочных материалов, а отдельные электронные компоненты смогут работать в условиях высоких температур. Это позволит аппарату просуществовать несколько месяцев на поверхности Венеры.
Цель конкурса «Exploring Hell: Avoiding Obstacles on a Clockwork Rover» — создание механических датчиков, которые должны обеспечивать безопасное передвижение аппарата по поверхности планеты, обнаруживая крупные камни, расщелины или крутые склоны. В общей сложности было подано 572 заявки от групп из 82 стран.
В итоге победителем стал проект «Venus Feelers» от архитектора из Каира Юсефа Гали (Youssef Ghali), который получит награду в 15 тысяч долларов. Его система состоит из ряда катков и трубок впереди ровера, а все колеса аппарата одеты в сетки. Второе место занял проект «Skid n' Bump — All-mechanical, Mostly Passive» от команды инженеров Team Rovetronics, их система состоит из подвижных рычагов, они получат награду в 10 тысяч долларов. Третье место занял проект «Direction Biased Obstacle Sensor — DBOS» от австралийского инженера Каллума Херона (Callum Heron), который получит награду в 5 тысяч долларов: его система состоит из рычагов и небольших катков и визуально похожа на элемент зерноуборочного комбайна.
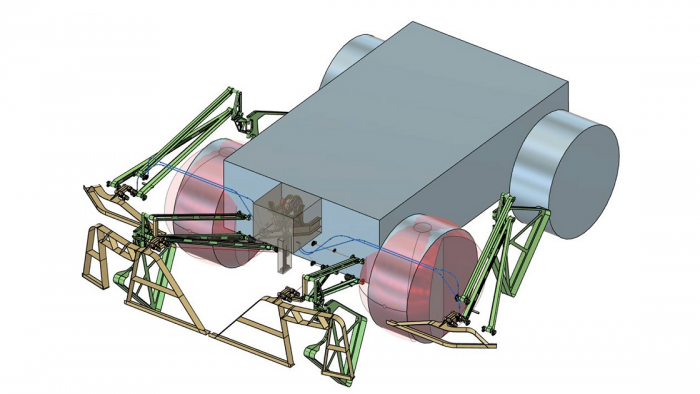 Концепт проекта «Skid n' Bump – All-mechanical, Mostly Passive», занявшего второе место в конкурсе. / NASA/HeroX/Team Rovetronics
Концепт проекта «Skid n' Bump – All-mechanical, Mostly Passive», занявшего второе место в конкурсе. / NASA/HeroX/Team Rovetronics
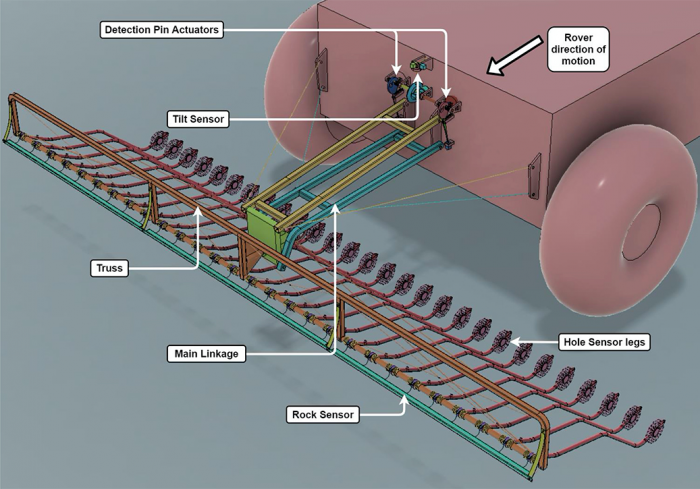 Концепт проекта «Direction Biased Obstacle Sensor», занявшего третье место в конкурсе. / NASA/HeroX/Callum Heron
Концепт проекта «Direction Biased Obstacle Sensor», занявшего третье место в конкурсе. / NASA/HeroX/Callum Heron
Еще два дополнительных приза в две тысячи долларов получили проекты «AMII Sensor» от команды из Латвии KOB ART и «ECHOS: Evaluate Cliffs Holes Objects & Slopes» от британского инженера Мэтью Рейнольдса (Matthew Reynolds), а десять других участников конкурса получили похвальные грамоты за свои изобретения.
- Источник(и):
- Войдите на сайт для отправки комментариев
