Робот собрал кокосы с пальмы
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Индийские инженеры разработали телеуправляемого робота для сбора кокосов с пальм. Он закрепляется на основании дерева, обхватывает его своим корпусом и двигается вверх с помощью восьми колес, а наверху срезает плоды с помощью манипулятора. Разработчики экспериментально подтвердили, что он может забираться на пальмы высотой 15 метров и наклонением до 30 градусов.
Испытания показали, что робот-сборщик работает медленнее обученного человека, но за день способен собрать кокосы с большего количества пальм, рассказывают авторы статьи в IEEE/ASME Transactions on Mechatronics.
Кокосы собирают разными методами. Если высота пальмы небольшая, то плоды можно срезать с помощью длинной палки с лезвием на конце или забраться наверх по приставной лестнице. Но высота некоторых пальм доходит до 15 метров, и в таком случае сборщикам приходится залезать на дерево. Кокосы в основном растут в развивающихся странах с не самым высоким уровнем жизни, так что сборщики обычно взбираются на пальму с помощью простых приспособлений и без страховки, рискуя здоровьем и жизнью.
Инженеры из Университета Амрита Вишва Видьяпитам под руководством Вину Сиванантама (Vinu Sivanantham) создали робота под названием Amaran, который умеет залезать на пальму и срезать кокосы. В центре робота расположена круглая рама, состоящая из двух половин для простой установки робота на ствол дерева. Снизу и сверху на раме есть рейки с колесами Илона на конце — благодаря им робот может ездить по поверхности ствола в любом направлении. Рейки соединены между собой пружинами, которые помогают прижимать колеса к дереву, чтобы они не теряли контакт с поверхностью и робот не падал вниз по стволу. На одной из сторон рамы крепится роботизированный манипулятор с четырьмя степенями свободы. На его конце установлена циркулярная пила для отрезания кокосовых плодов и камера, помогающая оператору точно управлять манипулятором.
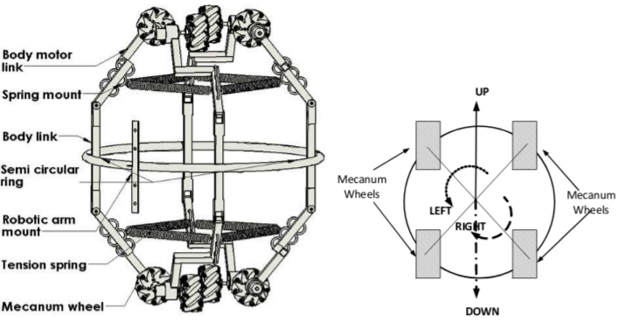 Конструкция робота / Rajesh Kannan Megalingam et al. / IEEE/ASME Transactions on Mechatronics, 2020
Конструкция робота / Rajesh Kannan Megalingam et al. / IEEE/ASME Transactions on Mechatronics, 2020
Робосборщик кокосов работает под управлением оператора, но не требует подключения по проводу. После того как оператор закрепил его на дереве, робот, питающийся от аккумулятора, поднимается наверх и принимает команды со смартфона или отдельного пульта по Bluetooth. На случай, если аккумулятор разрядился, предусмотрен аварийный аккумулятор меньшей емкости, который автоматически подключается при обесточивании первого и позволяет роботу безопасно спуститься.
Робота испытали в двух условиях: в лаборатории на трехметровом отрезке пальмы и на реальных деревьях высотой от 6,2 до 15,2 метра. Во время лабораторных испытаний угол наклона ствола менялся с 0 до 30 градусов. Испытания показали, что робот поднимается до конца трехметрового ствола в среднем за 13 секунд, а спускается примерно за восемь с половиной.
При реальных испытаниях авторы сравнили свою разработку с настоящим сборщиком. Он пять раз забирался за гроздьями кокосов на 9,6-метровую пальму и с учетом перерывов суммарно потратил на это 59,2 минуты. Робот в среднем тратит на обработку одной грозди кокосов 21,9 минуты (из них 14 минут уходит на подготовку у основания дерева). За восьмичасовой рабочий день оператора робот может залезть на дерево 22 раза, тогда как сборщики, по утверждению авторов, в среднем успевают сделать это только 15 раз за день, в основном из-за усталости.
- Источник(и):
- Войдите на сайт для отправки комментариев
