Ученые создали робота, который помог выяснить, как и зачем рыбы плавают косяками
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Косяк рыб — яркая демонстрация синхронности. Однако столетия исследований оставили без ответа главный вопрос: зачем рыбы так передвигаются? Экономят ли они энергию, плавая в косяках? Международная группа ученых дала ответ, проведя эксперимент с участием биомиметических роботов. Результаты исследования публикует журнал Nature Communications.
Используя биомиметических роботов, похожих на рыб, исследователи выяснили, что рыбы, которые перемещаются в косяке, могут использовать водовороты, создаваемые теми, кто впереди. Оказалось, что роботы получают гидродинамическую выгоду от ближнего соседа в косяке независимо от того, где они расположены. Это происходит за счет стратегии «вихревого согласованиея фаз». Такое правило поведения рыб в косяке ранее было неизвестно.
Экономия энергии
«Косяки рыб — очень динамичные социальные системы, — объясняет старший автор исследования Иэн Кузин. – Наши результаты объясняют, как рыбы могут получать „прибыль“ от вихрей, создаваемых ближайшими соседями, при этом необходимости сохранять фиксированные расстояния друг от друга нет».
Чтобы ответить на вопрос, может ли рыба экономить энергию, плавая с другими рыбами, необходимо измерить ее расход энергии. Точно сделать это с свободно плавающей рыбой невозможно, и прошлые исследования пытались ответить на этот вопрос с помощью теоретических моделей и прогнозов.
Роботизированное решение
Новое исследование, однако, преодолело этот барьер для экспериментального тестирования. Исследователи разработали трехмерную роботизированную рыбу с мягким хвостовым плавником, которая плавает, точно имитируя движения настоящей рыбы. Но, в отличие от своих живых собратьев, роботы позволяют напрямую измерять энергопотребление, связанное с плаванием вместе, а не в одиночку.
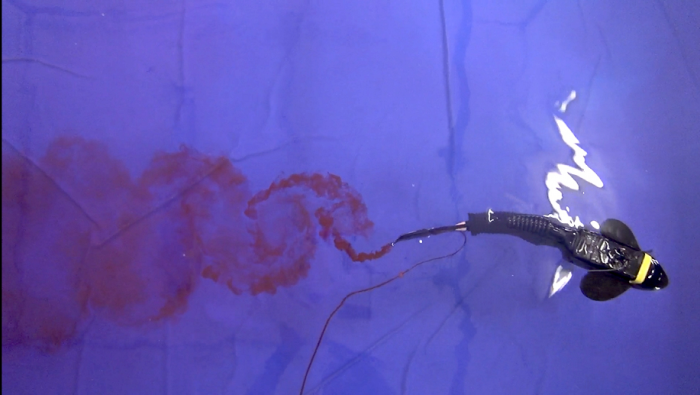
Проведя более 10 000 испытаний, они протестировали рыбу-робота во всех возможных положениях относительно лидера, а затем сравнили потребление энергии с плаванием в одиночку.
«Вихревое согласование фаз»
Результаты показали четкую разницу в энергопотреблении роботов, которые плавали в одиночку, и роботов, которые плавали парами. Они обнаружили, что причиной этого является то, как рыба впереди влияет на гидродинамику рыбы сзади.
Энергия, потребляемая преследующей рыбой, определяется двумя факторами. Имеет значение, находится ли рыба-последователь близко к лидеру косяка или далеко позади, а также как последователь регулирует удары своего хвоста, чтобы использовать вихри, созданные лидером.
Оказывается, секрет экономии энергии заключается в синхронизации. То есть рыба-последователь должна согласовывать ритм своего хвоста с ритмом лидера с определенным запаздыванием по времени, основанным на пространственном положении. Эту стратегию исследователи назвали «вихревым согласованием фаз».
Когда последователи находятся рядом с рыбой-лидером, наиболее энергетически эффективный способ сделать это — синхронизировать удары хвоста с лидером. Но по мере того, как последователи отстают, они должны выходить из синхронизации, отставая все больше и больше по сравнению с ударами хвоста лидера.
- Источник(и):
- Войдите на сайт для отправки комментариев
