Японцы использовали машинное обучение, чтобы сделать роботов гибкими
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Машинное обучение позволило сделать роботы исключительно гибкими. Результаты своей исследовательской работы опубликовали ученые из Университета Токио на сайте вуза.
Даже изготовленные из мягких материалов роботы все равно ограничены жесткостью датчиков, которые необходимы для управления. Но японские исследователи создали встроенные датчики, которые предлагают ту же функциональность, но предоставляют роботу большую гибкость. Мягкие роботы могут быть более адаптируемыми и эластичными, чем более традиционные жесткие конструкции. Команда использовала передовые методы машинного обучения для создания своего дизайна.
Автоматизация становится все более важной темой. Ядром этой концепции является смежная область робототехники и машинного обучения. Робот, который работает в реальном мире, должен понимать свою среду и себя, чтобы ориентироваться и выполнять задачи. Если бы мир был полностью предсказуемым, то робот мог бы прекрасно двигаться без необходимости узнавать что-то новое об окружающей среде. Но реальность непредсказуема и постоянно меняется, поэтому машинное обучение помогает роботам адаптироваться к незнакомым ситуациям. Хотя это теоретически верно для всех роботов, это особенно важно для роботов с мягким телом, поскольку их физические свойства по своей природе менее предсказуемы, чем их жесткие аналоги.
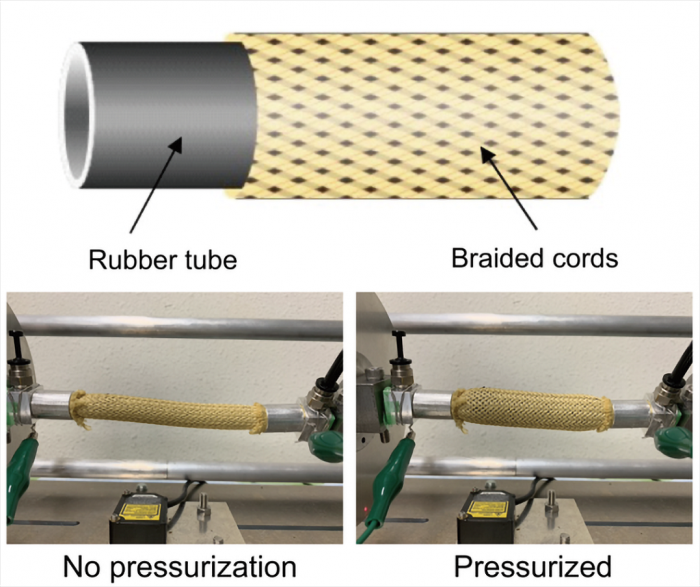
«Возьмем, к примеру, робота с пневматическими искусственными мышцами (PAM), системами на основе каучука и волокон, которые расширяются и сжимаются, чтобы двигаться, — рассказывает доцент Кохей Накадзима из Высшей школы информационных наук и технологий. — PAM по своей природе страдают случайным механическим шумом и гистерезисом, который по существу является напряжением материала. Точные лазерные мониторы помогают поддерживать контроль посредством обратной связи, но эти жесткие датчики ограничивают движение робота, поэтому мы придумали что-то новое».
Накадзима и его команда подумали, что если они смогут моделировать PAM в режиме реального времени, то смогут сохранить хороший контроль над ним. Однако, учитывая постоянно меняющуюся природу PAM, это нереально с традиционными методами механического моделирования. Таким образом, команда обратилась к мощной и устоявшейся технике машинного обучения, которая называется резервуарными вычислениями. Именно здесь информация о системе, в данном случае PAM, подается в специальную нейронную сеть в режиме реального времени, поэтому модель постоянно меняется и, таким образом, адаптируется к среде.
«Мы обнаружили, что электрическое сопротивление материала PAM изменяется в зависимости от его формы во время сжатия. Поэтому мы передаем эти данные в сеть, чтобы они могли точно сообщать о состоянии PAM, — продолжает Накаджима. — Обычная резина — это изолятор, поэтому мы включили углерод в наш материал, чтобы легче было понять его переменное сопротивление. Мы обнаружили, что система эмулирует существующий лазерный датчик с одинаково высокой точностью в различных условиях испытаний.
Благодаря этому методу возможно создание технологии мягкого робота нового поколения. Сюда могут входить роботы, которые работают с людьми, например, носимые устройства для реабилитации или биомедицинские роботы, поскольку дополнительное мягкое прикосновение означает, что взаимодействие с ними мягкое и безопасное.
- Источник(и):
- Войдите на сайт для отправки комментариев
