Для пневматической роборыбы разработали алгоритм управления
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Инженеры из Германии, Южной Кореи и США разработали алгоритм, описывающий движение модели рыбы в воде и позволяющий управлять движением ее плавника. Статья опубликована в журнале Advanced Intelligent Systems. Исследователи давно создают мягких роботов, в том числе и роборыб, по своему строению и принципу движения напоминающих настоящих. Большая часть этих работ сосредоточена на аппаратном обеспечении, материалах корпуса и актуаторах.
Однако для полноценной имитации рыбы необходимо также создать алгоритм, который бы мог задавать волнообразные движения рыбы, основываясь на ее строении и поведении окружающей воды.
Инженеры под руководством Адриана Юсуфи (Ardian Jusufi) из Института интеллектуальных систем Общества Макса Планка создали алгоритм управления пневматической роборыбой. Саму модель и датчик для измерения растяжения они взяли из двух предыдущих работ (1, 2).
Модель состоит из двух пневматических актуаторов, наклеенных на пластиковый лист. Актуаторы выполнены в виде полосок из эластичного полимера, в которых сделаны отдельные воздушные камеры. При подаче воздуха камеры расширяются, входят в контакт с соседними камерами и тем самым вынуждают актуатор и всю конструкцию изгибаться. Меняя давление в актуаторах с двух сторон модель рыбы может управлять изгибом своего корпуса и плавника (свободной части пластиковой пластины без наклеенных актуаторов).
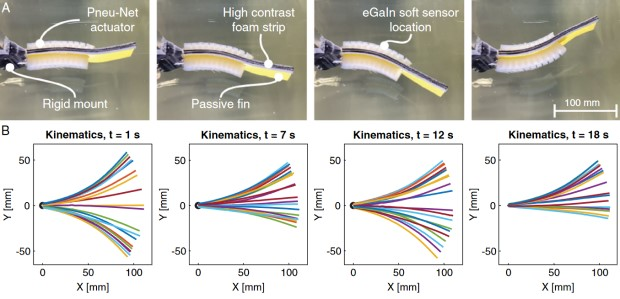 Структура модели рыбы и ее движение / Yu-Hsiang Lin et al. / Advanced Intelligent Systems, 2021
Структура модели рыбы и ее движение / Yu-Hsiang Lin et al. / Advanced Intelligent Systems, 2021
Датчик растяжения состоит из эластомерной пластины, внутри которой есть каналы с жидким при комнатной температуре сплавом, состоящим из галлия и индия. Принцип работы датчика прост: при растяжении сечение жидкости меняется и ее электрическое сопротивление тоже пропорционально меняется. Сами авторы сравнивают датчик с боковой линией рыб, при помощи которых они отслеживают движения окружающих их потоков воды. Два одинаковых датчика были установлены с двух сторон искусственной рыбы.
Авторы разработали легкую (с точки зрения требуемой вычислительной мощности) кинематическую модель динамики актуаторов, основанную на модели с сосредоточенными параметрами. Модель упрощенно описывает строение искусственной рыбы, рассматривая ее не как сплошную эластичную структуру, а как набор из четырех отдельных жестких элементов, соединенных петлями с нелинейной жесткостью. Жесткость петель задается величиной и соотношением давлений в двух актуаторах. Гидродинамическая модель рассматривает силу, оказываемую жидкостью на всю поверхность рыбы, как отдельные силы, действующие на середину каждого элемента: боковую и продольную.
Изначально инженеры проверили модели, поместив роборыбу на воздух. Они изгибали ее в разные стороны, модель по показаниям датчиков предсказывала текущую форму рыбы, а камера фиксировала реальное положение и затем эти две формы сравнивались. Это позволило подобрать корректные параметры модели, после чего авторы перешли к тестам в баке с водой. Дальнейшие эксперименты показали, что модель позволяет предсказуемо и постоянно добиваться от рыбы нужной амплитуды размахивания плавником.
Авторы отмечают, что в рамках этой работы они проверяли работу модели лишь в статичных условиях и при движении в потоке жидкости ее параметры могут некорректно описывать состояние и движения рыбы.
- Источник(и):
- Войдите на сайт для отправки комментариев
