Дрон с липучкой сел на стену
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Американские инженеры оснастили квадрокоптер липучкой, позволяющей ему садиться на вертикальную стену с подготовленной поверхностью, чтобы отключить двигатели и сэкономить заряд. Разработчики научили дрон автономно рассчитывать и выполнять маневр посадки на стену, используя свои камеры, инерциальный блок и вычислительный модуль.
Статья была представлена на конференции IROS 2021, ее препринт опубликован на arXiv.org.
Мультикоптер — это простая и удобная конструкция летательного аппарата, но довольно неэффективная. Как правило, у серийных мультикоптеров длительность полета составляет не более получаса. В случае, если необходимо долго снимать с воздуха, этого может быть недостаточно и часть времени придется тратить на посадку и замену аккумулятора.
Ранее инженеры предложили учить дроны подобно птицам зацепляться за ветки или другие предметы, чтобы отключать двигатели и не тратить заряд, продолжая снимать интересующее место на камеру. В обоих случаях дрон приходилось существенно модифицировать, добавляя большой и тяжелый механизм.
Группа инженеров под руководством Джузеппе Лоянно (Giuseppe Loianno) из Нью-Йоркского университета использовала другой подход, при котором дрон может садиться на стену. Стену для этого необходимо модифицировать, зато сам дрон можно оснастить всего лишь липучками, которые почти не влияют на его летные характеристики.
Авторы использовали самодельный квадрокоптер с двумя камерами, смотрящими вниз и вперед. Первая из них позволяет отслеживать положение дрона, а вторая следит за посадочной площадкой. Для посадки дрону нужна подготовленная площадка с текстильной липучкой и четырьмя матричными кодами по бокам — они позволяют рассчитать размеры посадочной площадки и определить ее центр. Поняв положение площадки, дрон рассчитывает траекторию посадки. При подлете он сначала ныряет, затем набирает скорость и поднимается к площадке, а в самый последний момент наклоняется, чтобы приземлиться почти параллельно ей. Если посадка прошла успешно, двигатели выключаются.
Эксперименты показали, что дрон способен проводить расчеты локально в реальном времени, и в большинстве случаев он справляется с задачей. Помимо посадки на вертикальную стену, авторы также протестировали посадку на поверхность с уклоном 60 градусов (вместо 90), но в таком случае они чаще сталкивались с неудачей.
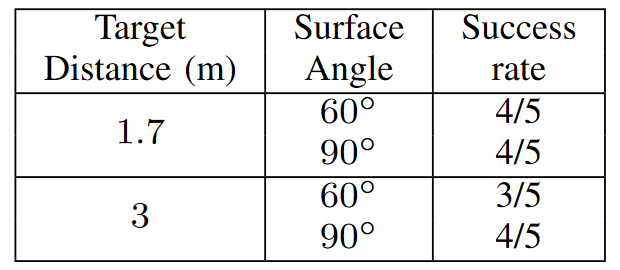 Испытания дрона при разных параметрах Jeffrey Mao et al / IROS 2021
Испытания дрона при разных параметрах Jeffrey Mao et al / IROS 2021
Существует дрон, способный сидеть даже на потолке. Для этого он используетhttps://nplus1.ru/news/2016/05/16/drone-on-the-ceiling микрошипы, цепляющиеся за небольшие неровности на поверхности потолка.
- Источник(и):
- Войдите на сайт для отправки комментариев
