Двуногого робота с вентиляторами научили летать
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Китайские инженеры создали двуногого робота, способного летать. У него есть четыре вентилятора, в том числе два в стопах, с помощью которых он взлетает и стабилизирует себя в полете. Пока робот находится в стадии прототипа, поэтому авторы продемонстрировали лишь несколько коротких вертикальных взлетов, но в 2022 году они планируют рассказать новые подробности на конференции ICRA.
Препринт доклада доступен на arXiv.org.
Шагающие роботы считаются наиболее перспективной конструкцией для применения в условиях со сложным рельефом. Они могут адаптироваться к резким изменениям высоты и внешним воздействиям. Но даже шагающим роботам не под силу некоторые препятствия, в частности слишком большие перепады высот, сравнимые или большие чем их собственный размер. Несколько групп инженеров предлагает решать эту проблему с помощью отдельного дрона-компаньона, который либо просто осматривает местность в высоты, либо помогает роботу забраться наверх.
В 2018 году группа китайских инженеров из Гуандунского технологического института под руководством Чжифэн Хуан (Zhifeng Huang) показала робота Jet-HR1, который может переступать через большие ямы, используя необычную конструкцию — в его ногах установлены вентиляторы, которые не дают роботу упасть, пока он тянет ногу далеко вперед. В новой работе разработчики создали вторую версию робота, главным новшеством в которой стало четыре вентилятора вместо двух, что позволяет роботу полностью отрываться от пола.
В целом Jet-HR2 повторяет конструкцию предшественника: у него две ноги с вентиляторами в стопах, но теперь перемещенных в их середины, чтобы вектор тяги проходил вдоль ноги. Другое заметное отличие заключается в том, что в верхней части корпуса появились два вентилятора и два больших аккумулятора.
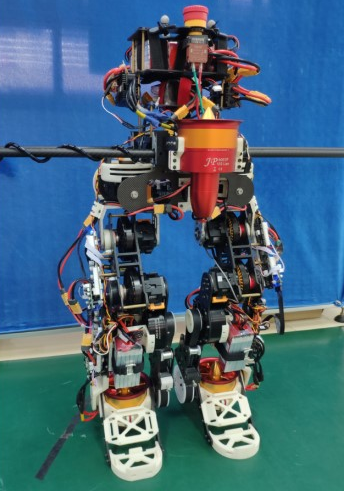 Jet-HR2 / Yuhang Li et al. / arXiv.org, 2021
Jet-HR2 / Yuhang Li et al. / arXiv.org, 2021
У Jet-HR2 есть 10 степеней свободы, но они используются только во время ходьбы, потому что авторы решили упросить модель и полностью фиксировать ноги во время полета. В противном случае векторы тяги были бы не параллельны, что сильно усложняет моделирование и маневрирование в полете, особенно учитывая низкую тяговооруженность — 1,17.
Разработчики написали для робота два контроллера, отвечающих за компенсацию тангажа и рыскания. На демонстрационном ролике можно увидеть полеты с включенными и выключенными контроллерами, на которых видно их влияние на стабилизацию полета. Пока инженеры испытали робота лишь в коротких полетах, во время которых им приходилось держать его за страхующие направляющие.
- Источник(и):
- Войдите на сайт для отправки комментариев
