Мягкий подводный робот опустился в Марианскую впадину
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Китайские разработчики сконструировали мягкого робота с гибкими электронными компонентами и полимерными плавниками, которые позволяют ему переносить колоссальное давление на глубинах больше 10 километров.
Давление воды увеличивается на атмосферу с каждыми десятью метрами глубины, и ниже нескольких сотен метров не способны опуститься даже подлодки. Батискафы, работающие на глубине в тысячи метров, требуют сверхпрочного корпуса: даже беспилотный аппарат нуждается в защите внутренних механизмов и электроники от такого огромного давления.
Неудивительно, что дно Мирового океана остается по большей части практически неисследованным. Поэтому китайские разработчики выбрали иной подход к созданию глубоководных машин и разработали мягкого робота, практически нечувствительного к давлению «за бортом». Об этом они пишут в статье, опубликованной в журнале Nature.
Как и многие их коллеги, авторы вдохновлялись примерами из живой природы. По словам конструкторов, идея была подсказана морскими слизнями, самыми глубоководными из известных рыб. В частности, кости их черепа не срастаются друг с другом, что позволяет ему легко деформироваться, подстраиваясь под давление среды. Так же обычные жесткие электронные компоненты у робота разделены на небольшие части, соединенные гибкими контактами, и размещены в разных частях его мягкого тела. А те микросхемы, для которых это невозможно, были изготовлены с увеличенными промежутками между кристаллами, благодаря которым они тоже способны выдерживать деформации без нарушения работоспособности.
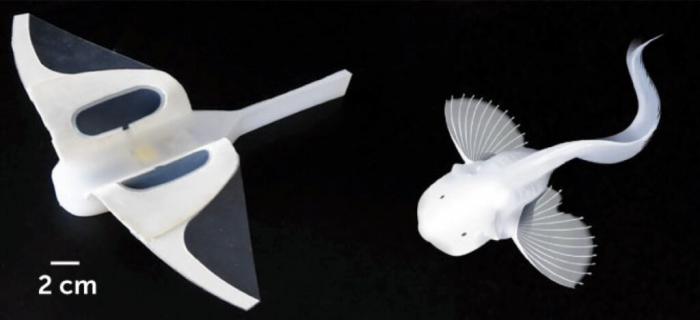 Общий план строения робота заимствован у глубоководных морских слизней / ©©Li et al., 2021
Общий план строения робота заимствован у глубоководных морских слизней / ©©Li et al., 2021
Кроме того, движения «плавников» машины обеспечивают не двигатели, а гибкие полимеры, способные сокращаться под действием электричества. Стандартные решения для этого не подошли: эксперименты показали, что при достаточно большом давлении и низкой температуре величина их сокращений падает с примерно 20 до трех процентов, чего уже недостаточно для движения. Поэтому авторы подобрали новый полимерный материал, не такой эффективный в обычных условиях (сокращение около 13 процентов), зато не теряющий производительности с давлением так быстро (сокращение остается на уровне около семи процентов).
В целом робот напоминает помесь летучей рыбы со скатом: по бокам мягкого тела раскинуты мягкие плавники, сзади извивается длинный гибкий хвост. Общая длина аппарата составляет около 22 сантиметров, а «размах крыльев» — 28 сантиметров. Полимерные «мускулы» находятся в местах их соединений с туловищем; сами плавники выполнены из тонкой мембраны, которая и позволяет им отталкиваться от воды. Они не могут обеспечить скоростное перемещение, но это не так уж важно: главное — робот легко переносит любое давление в море.
- Источник(и):
- Войдите на сайт для отправки комментариев
