Баттерфляй по Азимову: самый быстрый мягкий робот-пловец в мире
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Около 70% поверхности Земли покрыто водой, потому нет ничего удивительного, что многие сухопутные живые существа обладают умением плавать. Люди также способны обучиться этому навыку, но не обладают им с рождения, как утверждает распространенный миф. Разные пловцы, независимо от видовой принадлежности, используют разные техники плавания, чтобы максимизировать эффективность продвижения вперед и минимизировать затраты энергии, учитывая строение тела и другие сопутствующие факторы.
Одним из самых распространенных методов является баттерфляй. Ученые из университета штата Северная Каролина (США) разработали мягкого робота-пловца, который, используя технику баттерфляй, способен достигать рекордных скоростей.
Какова конструкция робота, какие физические принципы лежат в основе его работы, и насколько он быстр? Ответы на эти вопросы мы найдем в докладе ученых.
Основа исследования
Для нас баттерфляй это техника плавания на животе, когда пловец совершает симметричные движения руками в виде широкого и резкого гребка, ноги и таз в этот момент совершают волнообразные движения (как у дельфинов). Если же рассматривать других животных, то подобные взмахи конечностями присущи как пловцам, так и летунам. Независимо от вида, существа используют сгибание и/или вращение гибких крыльев, плавников, тела или хвостов для пассивного повышения эффективности движения с целью экономии энергии.
Среди них многие двигаются в крейсерском режиме в узком диапазоне безразмерного числа Струхаля* (St) (безразмерная величина, один из критериев подобия нестационарных (часто колебательных) течений жидкостей и газов), определяемого как St = fA/U (f и A — частота и амплитуда взмахов, U — поступательная скорость), т.е. 0.2 < St < 0.4 для высокой энергоэффективности.
С развитием робототехники многие ученые и инженеры пытались создать роботов, имитирующих вышеупомянутых летунов и пловцов, используя при этом технику баттерфляй. Однако, что не удивительно, характеристики роботов были значительно хуже, чем у животных. К примеру, скорость движения (BL/s — длина тела в секунду) у таких роботов не превышала 1, тогда как у некоторых морских животных она может варьироваться от 2 до 24. Такая же картина сохраняется и в оценке эффективности: St > 1 или St < 0.1 у мягких роботов по сравнению с 0.2 < St < 0.4 у морских животных. Потому создание мягких роботов, способных конкурировать со своими природными прототипами, до сих пор остается сложной задачей.
Авторы рассматриваемого нами сегодня труда нашли решение этой проблемы в виде щелчковых бистабильных гибких крыльев. В данном контексте щелчок — это быстрое движение, которое часто наблюдается в природе (например, быстрое закрытие венериной мухоловки). Бистабильность крыльев обусловлена наличием у них двух отдельных стабильных форм. Они могут обратимо переключаться из одной стабильной формы в другую в течение десятков миллисекунд и оставаться в любом стабильном состоянии без потребления энергии.
Ученые отмечают, что в последнее время использование бистабильности для высокопроизводительных мягких роботов стало одним из лучших способов решения проблем, связанных с податливостью мягкого тела, таких как медленная реакция и малая сила. Бистабильность обеспечивает быструю реакцию и усиление силы в мягких приводах за счет быстрого высвобождения энергии во время щелчка. Для водных роботов это особенно полезно, так как им приходится преодолевать куда большее сопротивление, нежели на суше или в воздухе.
 Изображение №1
Изображение №1
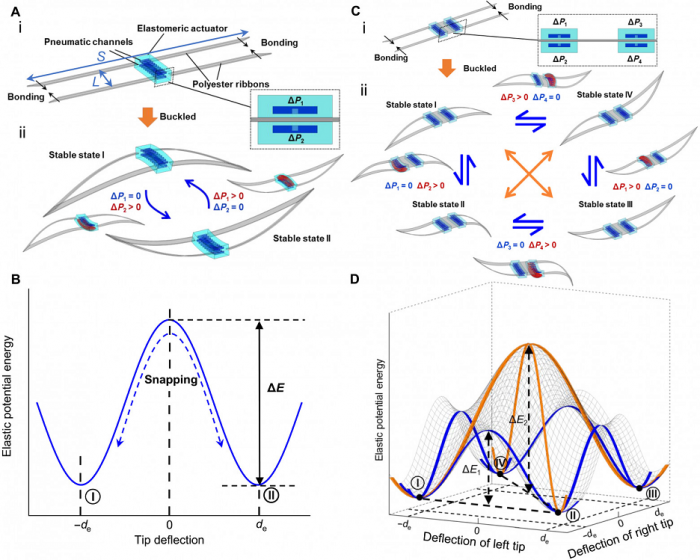
В труде, о котором сегодня идет речь, ученые продемонстрировали прототип конструкции бистабильных и мультистабильных роботов, состоящих из изгибающихся актуаторов и предварительно изогнутых гибких крыльев (изображение №1). Привод взмахов сконструирован путем соединения двух параллельных лент каркаса крыла на конце, чтобы сформировать пару бистабильных предварительно изогнутых гибких крыльев (1А). Приведенное в действие небольшое сгибание мягкого тела может вызвать пассивное щелканье крыльев для значительного усиления взмахов и вращательных движений.
Описание и характеристики робота-пловца
На 1A показана схема конструкции мягкого бистабильного привода взмаха.
- Источник(и):
- Войдите на сайт для отправки комментариев
