Инженеры создали гибкие приводы для роботов на основе оригами
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Исследователи использовали модули оригами для проектирования мягких приводов, изменяющих форму под давлением. Исследователи из Гарвардской школы инженерии и прикладных наук использовала классический узор оригами, известный как мотив Креслинга, для создания мягких надувных приводов.
Устройства, которые можно использовать в качестве легких и гибких компонентов робототехнических систем, описаны в Advanced Functional Materials.
Мотив Креслинга представляет собой цилиндр, собранный из треугольников. На поверхности такого элемента чередуются ребра и впадины. Сначала исследователи создали простые моностабильные модули на основе шаблона Креслинга. Чтобы разблокировать бистабильность (стабильность в двух разных положениях), они добавили дефект в мотив оригами: дополнительный узел, который создает купол из четырех треугольников. Он может открываться или закрываться под действием положительного или отрицательного давления.
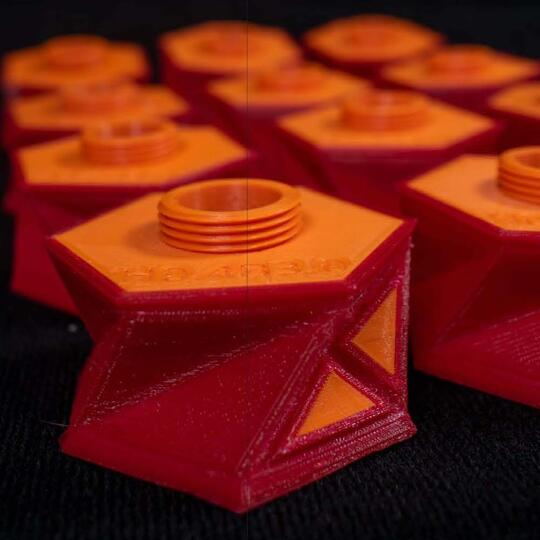 Дополнительный узел на модуле (маленькие желтые треугольники). Фото: Bertoldi Lab, Harvard SEAS
Дополнительный узел на модуле (маленькие желтые треугольники). Фото: Bertoldi Lab, Harvard SEAS
Это работает очень просто. Сначала мы надуваем структуру при определенном давлении, чтобы вытолкнуть определенные ячейки, которые останутся выгнутыми, даже когда давление пропадет. Затем, в этой новой конфигурации, поскольку мы нарушаем симметрию, мы можем просто использовать вакуум, чтобы вызвать изгиб, сжатие или скручивание, – Антонио Элиа Форте, соавтор исследования.
Исследователи отмечают, что, собирая различные модули и настраивая их геометрию так, чтобы они фиксировались при различном давлении, можно создавать сложные формы и режимы деформации. В результате, используя только источник давления без проводов и электроники, можно управлять запрограммированными движениями.
Разработчики построили привод с 12 различными модулями и показали, что он может выполнять до восьми различных сложных движений. Команда также разработала алгоритм, который может определить оптимальную комбинацию модулей для желаемых режимов деформации.
- Источник(и):
- Войдите на сайт для отправки комментариев
