Модульные роботы: проекты, за которыми стоит следить
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Блог компании Selectel. Автор: Влад Ефименко. Модульными называются роботы, структура которых может изменяться с помощью добавления узлов, самостоятельных по отдельности. Они могут быть полезны в разных областях — от разработки игр до медицины и космонавтики. Под катом собрали перспективные проекты модульных роботов. Как они работают, каких бывают форм и какие у них проблемы в реализации — рассказываем в подборке.
M-Blocks. Прямиком из MIT
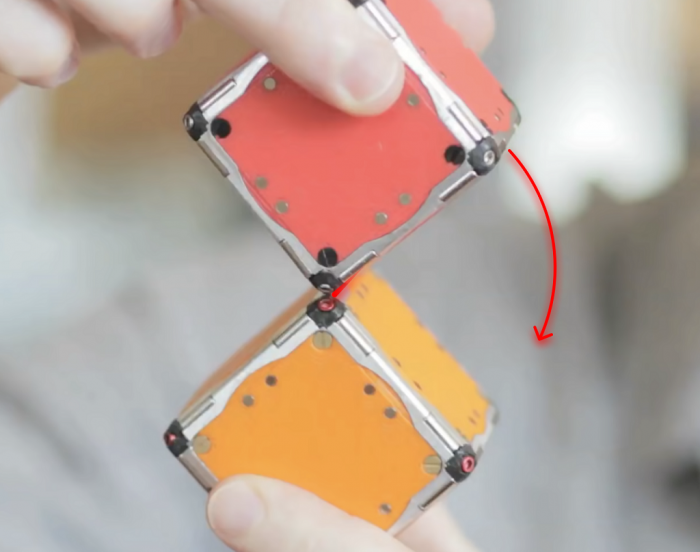
Одним из первопроходцев в мире модульной робототехники стал молодой инженер Джон Романишин. В 2013 году он создал схему для самосборки роботов. Небольшие кубики без внешних подвижных частей могут передвигаться, прыгать друг на друга и соединяться. Технология получила название M-Blocks.
 M-Blocks, без корпуса.
M-Blocks, без корпуса.
Презентация проекта
Поначалу мало кто верил в разработку. В 2011 году Джон показал дизайн M-Blocks профессору робототехники Даниэле Рус. Она сказала, что это невозможно сделать, но через два года показала проект своему коллеге, исследователю в Корнельском университете. Он подтвердил нереализуемость разработки.
Позже Даниэла признала ошибку и поддержала Джона. Через два года он продемонстрировал свою разработку на Международной конференции IROS, тем самым доказав работоспособность M-Blocks.
Как это работает
Магии здесь нет: кубы могут перемещаться без внешних подвижных элементов. Внутри каждого установлен маховик, вращающийся со скоростью 20 000 оборотов в минуту. В момент резкой остановки «создается» инерция, побуждающая куб двигаться в определенном направлении.
Чтобы кубы стыковались между собой, на ребрах каждого из них есть цилиндрические магниты. Когда два куба сближаются, магниты поворачиваются друг к другу разноименными полюсами.
Когда кубы далеко друг от друга, они передвигаются почти хаотично: прыгают в разные стороны и делают сальто. Зато вблизи работают по принципу «скользящего куба». Так называется эффект, когда один куб двигается вдоль другого, вокруг общей оси — намагниченного ребра.
 Фрагмент из видеоролика
Фрагмент из видеоролика
Вторая версия и штрих-коды
В первой версии M-Blocks кубы передвигались почти хаотично, с помощью динамики и магнитного воздействия. Им не хватало «осознанности».
Через шесть лет вышла вторая версия проекта. Кубы-роботы «научились» общаться друг с другом, используя систему, напоминающую штрих-код. На каждой из граней есть свой код для идентификации. Также в каждом блоке установлены датчики для считывания направлений и световых сигналов. Так они могут распознавать друг друга и собираться в нужные структуры.
Мечты и перспективы
Сегодня проект M-Blocks поддерживают Национальный научный фонд и Amazon Robotics. Есть надежда на дальнейшую миниатюризацию устройства. Одна из целей проектов, подобных M-Blocks, — создать систему микроботов, способную собираться в сложные структуры.
Напрашивается пример из «Мстителей», — боевой костюм из микроскопических роботов. Но до этого еще далеко. Пока реальным кажется использование модульных роботов M-Blocks, например, в интерактивных играх.
«Мы хотим, чтобы сотни кубиков, разбросанных случайным образом по полу, могли идентифицировать друг друга, объединяться и собираться в стул, лестницу или стол», – Джон Романишин, основатель проекта M-Blocks.
Сферические роботы
FreeBOT
Еще один выходец Международной конференции IEEE/RSJ по интеллектуальным роботам (IROS) — проект ученых из университета Шэньчжэнь. В 2020 году они представили модульного робота FreeBOT.
 FreeBOT.
FreeBOT.
Как это работает
Визуально — полная противоположность M-Blocks. Модули состоят из железных сфер, внутри которых два колеса, моторчик, магнит, плата и батарейка. С помощью колес возникает вращение и движение сферы по поверхности. Похожее устройство у известного робота BB-8 производства Sphero.
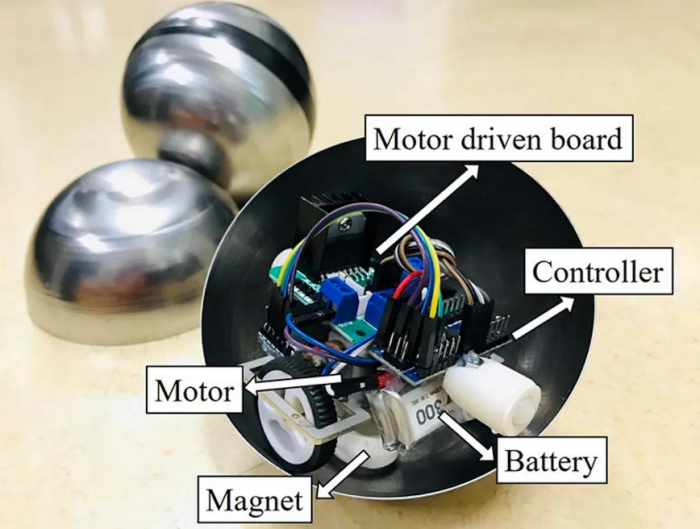 Устройство сферы FreeBOT.
Устройство сферы FreeBOT.
Магнит направляет конструкцию и позволяет соединять сферы между собой. Благодаря ферромагнитному корпусу сферы сильнее прилипают друг к другу. Магнитомягкие свойства железного корпуса позволяют сферам легко разъединяться. Достаточно увести магнит в другую сторону.
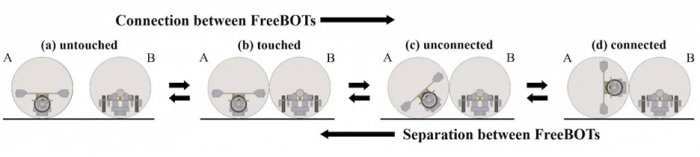 Взаимодействия сфер FreeBOT.
Взаимодействия сфер FreeBOT.
Что стало с проектом сегодня
Модульный робот FreeBOT получил продолжение в самостоятельном проекте FreeSN.
- Источник(и):
- Войдите на сайт для отправки комментариев
