Норвежцы разработали дрон для подземной разведки
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Норвежцы разработали дрон RMF-Owl для автономной подземной разведки. Как сообщает New Scientist, он умеет уходить от столкновений, а его корпус к ним устойчив. Работы под землей — в шахтах, метро, сетях пещер — связаны с повышенной опасностью. Если поручить поиск, разведку и составление карт роботам и дронам, это поможет избавить людей от лишних рисков.
Избегать препятствий в замкнутом пространстве — сложная задача для подземных роботов и дронов. Особенно, когда они находятся вне доступа к глобальной навигационной спутниковой системы. Если говорить о дронах, эта проблема становится тем острее, чем больше у них радиус полета и масштаб автономных миссий.
Дрон RMF-Owl, которого разработали Паоло де Петрис (Paolo De Petris) и его коллеги из Норвежского университета науки и технологий, уcтойчив к столкновениям: его корпус выполнен из многослойной углеродной пены. Он оснащен четырьмя моторами и полетным контроллером PixRacer R15, который контролирует положение и тягу. При длине и ширине 38 сантиметров его масса — 1,45 килограмма. RMF-Owl рассчитан на десять минут полета.
Чтобы точно определять местонахождение и наносить на карту подземные пространства, RMF-Owl использует одометрию с лидара и систему одновременной ориентировки и картографирования CompSLAM. Она тоже опирается на данные лидара, но также камер, тепловизоров и инерциальных измерительных датчиков IMU. Вести автономную разведку дрону помогают локальный и глобальный планировщик траектории. Локальный определяет маршрут, учитывая движение аппарата и ограничивающих факторов. А глобальный помогает, когда локальный не может найти путь, значимый для разведывательной миссии, и контролирует, что дрон успеет вернуться.
RMF-Owl умеет не только исследовать и наносить на карту подземные пространства, но и искать в них объекты. В основном, с помощью сверточной нейросети YOLO v3, обученной на датасете из более чем 40 тысяч объектов. Еще дрон может определять устройства с Bluetooth в режиме поиска.
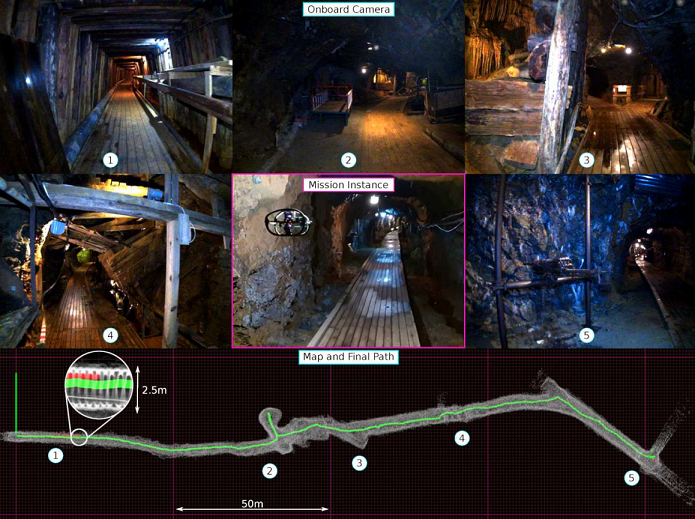
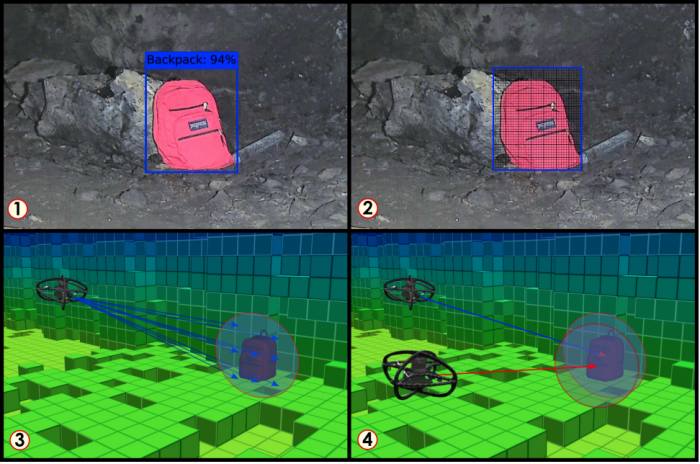 De Petris et al. / Arxiv.org
De Petris et al. / Arxiv.org
Инженеры испытали RMF-Owl в норвежской шахте, где он самостоятельно поднялся в воздух, спланировал маршрут без столкновений в узком коридоре и за 6,6 минуты пролетел более двухсот метров. Кроме того, он участвовал в прошлогодних соревнованиях управления перспективных исследовательских проектов Пентагона в команде CERBERUS. Там он обменивался данными с другими роботами по WiFi.
- Источник(и):
- Войдите на сайт для отправки комментариев
