Роботизированный аналог Nautilus pompilius помог изучить движение головоногих моллюсков
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Американские инженеры создали нескольких роботов, конструкция и принцип движения которых основано на строении головоногих моллюсков Nautilus pompilius. Варьируя параметры раковин и испытывая их в бассейне, исследователи выяснили, как строение моллюсков влияет на параметры их движения.
Статья опубликована в Scientific Reports.
В робототехнике есть направление, в рамках которого инженеры воссоздают строение и функции конкретных живых организмов. Это может быть как подражание в общих чертах, как в случае с четвероногими роботами, так и точное воссоздание механизмов. Второй тип часто позволяет разобраться в принципах движения животных. К примеру, рассказывали о том, как летающий робот помог объяснить полет дрозофил, а 3D-печатная копия клешни рака-щелкуна позволила воспроизвести его механизм генерации плазмы.
Дэвид Питерман (David Peterman) и Кэтлин Риттербуш (Kathleen Ritterbush) из Университета Юты создали робота с 3D-печатным аналогом раковины головоногого моллюска Nautilus pompilius, что позволило проверить, как строение раковины этих моллюсков влияет на характеристики их движения под водой. Ранее другие исследователи предлагали представлять разные раковины аммонитов (вымерших видов головоногих моллюсков) в морфологическом пространстве в виде треугольника. Авторы новой работы создали четыре прототипа, из которых форма трех относится к вершинам этого треугольника, а четвертый располагается в его центре и представляет собой усредненный вариант, сочетающий черты остальных трех:
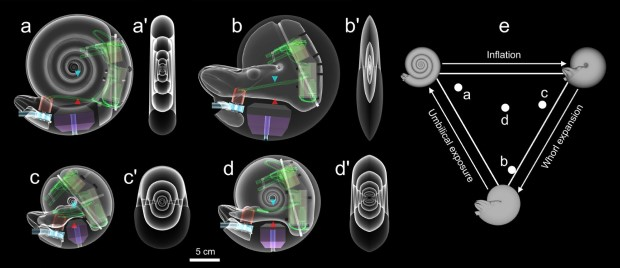 Строение четырех прототипов и их расположение в морфологическом пространстве головоногих моллюсков с раковинами / David J. Peterman, Kathleen A. Ritterbush / Scientific Reports, 2022
Строение четырех прототипов и их расположение в морфологическом пространстве головоногих моллюсков с раковинами / David J. Peterman, Kathleen A. Ritterbush / Scientific Reports, 2022
Чтобы получить базовую модель раковины, Питерман и Риттербуш отсканировали раковину Nautilus pompilius с помощью компьютерной томографии. Затем они модифицировали эту модель так, чтобы получились раковины по краям морфологического пространства аммонитов и еще одна по центру. Создав четыре 3D-модели раковин, исследователи распечатали их на 3D-принтере, размер раковин составлял около 15 сантиметров в диаметре. Внутри они расположили микроконтроллер, аккумулятор, электромотор, винт и другие компоненты. Масса была подобрана так, чтобы робот сохранял в воде нейтральную плавучесть.
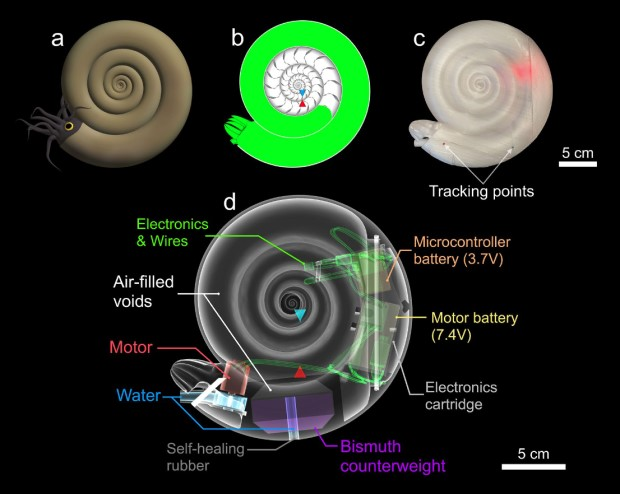 David J. Peterman, Kathleen A. Ritterbush / Scientific Reports, 2022
David J. Peterman, Kathleen A. Ritterbush / Scientific Reports, 2022
Протестировав роботов в бассейне, инженеры убедились в их работоспособности и выявили некоторые особенности движений, которые дает их форма. Причем выяснилось, что каждая форма имеет свои преимущества. Так, роботы с менее широкими раковинами более стабильны и двигаются эффективнее за счет меньшего сопротивления, зато роботы с более широкими раковинами более маневренны, но при этом передвигаются не так далеко при импульсном движении, поэтому вероятно, что аммонитам с такой формой приходилось чаще выталкивать воду при движении.
- Источник(и):
- Войдите на сайт для отправки комментариев
