Визуальная навигация позволила роботу найти место с фотографии
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Американские инженеры разработали алгоритм навигации для роботов, позволяющий им находить нужное место по фотографии и координатам. Он состоит из двух контроллеров: локального, ориентирующегося вблизи по данным с камеры, и глобального, прокладывающего примерный маршрут.
Статья опубликована на arXiv.org.
Для навигации в робототехнике чаще всего используют те или иные подходы, основанные на точных картах окружающего пространства. При этом инженеры обычно концентрируются на локальной навигации внутри зданий, тогда как глобальная навигация — это тоже важная задача, требующая отдельного подхода. Люди решают проблему перемещения из точки А в точку Б в городе, комбинируя навигацию на обоих масштабах и не строя высокоточную 3D-карту окружающего пространства. Вместо этого мы можем запомнить ключевые объекты на большой карте из навигатора и узнать их при приближении.
Друв Шах (Dhruv Shah) и Сергей Левин (Sergey Levine) из Калифорнийского университета в Беркли разработали похожий метод навигации для роботов и назвали его ViKiNG (Vision-Based Kilometer-Scale Navigation with Geographic Hints, «Навигация на масштабе километров с географическими подсказками, основанная на зрении»).
Метод подразумевает использование двух контроллеров: локального и глобального.
Локальный работает с кадрами, которые он в реальном времени получает с камеры на роботе. Задача этой части навигационной системы заключается в том, чтобы управлять непосредственным движением робота и, например, не заехать в яму или на камень. Соответственно, локальный контроллер рассчитывает реально достижимые маршруты на несколько метров вперед и дает глобальному контроллеру несколько ближайших точек-кандидатов на маршруте. Он же, в свою очередь, проверяет, насколько эти промежуточные точки помогают приблизиться к пункту назначения, и выбирает из них оптимальную.
Помимо расстояния контроллер учитывает и другие факторы, которые он получает из карты или спутникового снимка. К примеру, в городе он будет посылать робота в основном через тротуары.
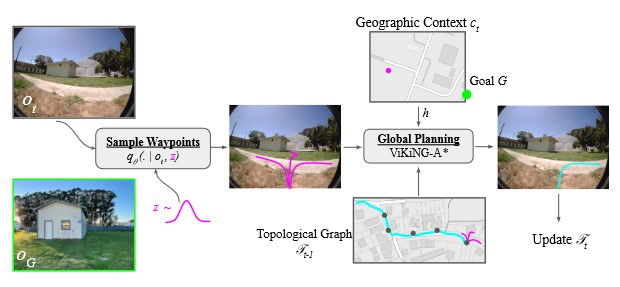 Схема метода / Dhruv Shah, Sergey Levine / arXiv.org, 2022
Схема метода / Dhruv Shah, Sergey Levine / arXiv.org, 2022
Инженеры обучили систему навигации на 42 часах поездок роботов: 30 из них они взяли из своей предыдущей работы, а еще 12 записали сами, удаленно управляя роботом на улицах. Затем они проверили ее работу на колесном роботе Clearpath Jackal UGV.
Во время работы робот получал изображение и примерные координаты нужного места, а также доступ к картам из Google Maps. В результате робот смог проехать большое расстояние и прийти к заданным целям. В одном из заездов разработчики дали ему пять целей — робот смог найти их все и суммарно проехал 2,65 километра, тогда как в обучающей выборке максимальное расстояние заездов составляло 80 метров.
- Источник(и):
- Войдите на сайт для отправки комментариев
