B MIT придумали, как быстро собирать гибких подводных роботов
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Инженеры разработали модульную систему для быстрой сборки крупных подводных роботов. Устройства могут принимать различную форму: от угря до плавающих крыльев. Исследователи из Массачусетского технологического института разработали модульные трансформирующиеся решетки, из которых можно быстро собрать гибких подводных роботов. Вместо уникальных компонентов исследователи предлагают использовать повторяющиеся структуры.
Технологию легко масштабировать для разработки роботов длиной в несколько метров. В основе предложенной технологии решетчатые конструкции, которые исследователи называют вокселями. Это полые конструкции, состоящие из литых пластиковых деталей с узкими распорками сложной формы. Структура этих элементов спроектирована таким образом, чтобы они были жесткими и несли нагрузку в одном направлении, но при этом были мягкими в другом. Этого удалось достичь путем смешивания жестких и гибких компонентов в разных пропорциях.

Авторы работы отмечают, что плавная гибкость поверхности корпуса позволяет управлять потоком, уменьшить сопротивление и повысить эффективность тяги, что приводит к значительной экономии топлива при движении в водной среде.
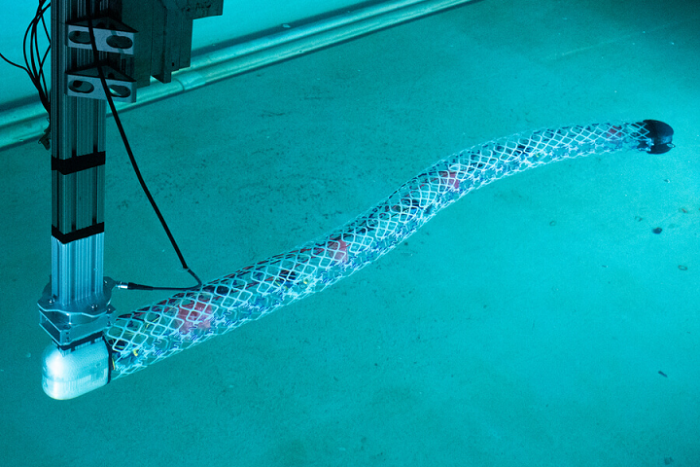
Для демонстрации технологии исследователи спроектировали и собрали двух тестовых роботов. В первом устройстве воксели соединили в длинный ряд, сформировав метровую змеевидную структуру. Тело «угря» собрали из четырех сегментов, в каждом из которых пять вокселей и механический привод в центре. Он управляет проводом, прикрепленным к каждому из двух вокселей с обеих сторон. Натяжение провода сжимает элементы и заставляет структуру изгибаться.
 Морской угорь и крыло, собранные из вокселей. Изображения: MIT
Морской угорь и крыло, собранные из вокселей. Изображения: MIT
Инженеры покрыли своего змея ребристой несущей структурой и водонепроницаемым покрытием. Испытания показали, что такой метровый змей успешно генерирует тягу и может перемещаться в воде волнообразными движениями. Собрав те же основные элементы в другой последовательности, исследователи изготовили подводное крыло, способное изменять форму профиля и аэродинамические свойства.
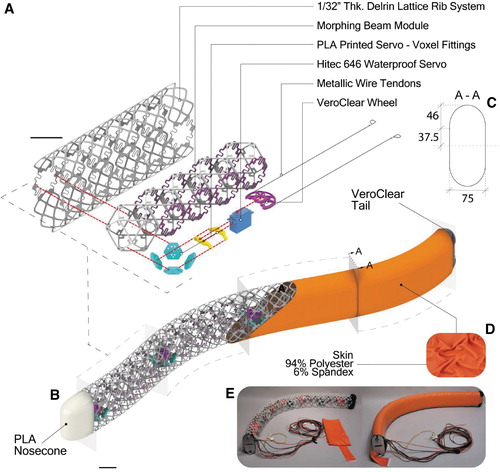
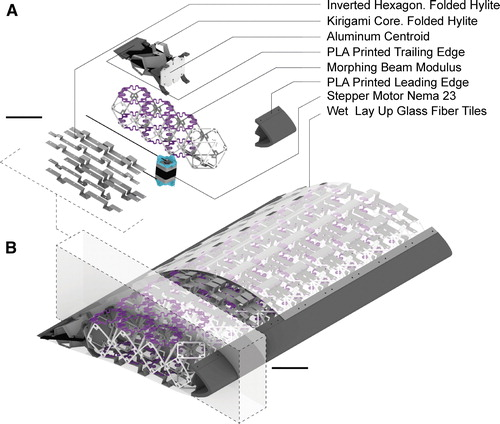
Внутреннее устройство робота-угря и крыла. Изображения: Alfonso Parra Rubio et al., Soft Robotics
Авторы разработки отмечают: хотя сами по себе новые роботы не являются новыми, альтернативные разработки опираются на тысячи уникальных деталей, которые изготавливаются под конкретный проект. Предложенный подход значительно сокращает время изготовления и сборки роботов и роботизированных конструкций. Например, его можно использовать для разработки и усовершенствования отдельных компонентов кораблей и подводных лодок.
- Источник(и):
- Войдите на сайт для отправки комментариев
