Машинное обучение не даст таракану-киборгу сидеть на месте. Алгоритм уменьшает время простоя на 78 процентов
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Инженеры из Японии создали алгоритм машинного обучения, который автоматически стимулирует таракана-киборга больше двигаться и не позволяет ему долго оставаться в одном месте. Движение таракана контролируется с помощью электроимпульсов, генерируемых рюкзачком с системой дистанционного управления. Алгоритм увеличил на 70 процентов среднюю дистанцию, пройденную киборгом, и снизил время простоя таракана на 78 процентов.
Статья опубликована в Cyborg and Bionic Systems.
Миниатюрные роботы могут пригодиться в самых разных сферах: от ремонта авиационных двигателей до поиска выживших под завалами. Однако из-за недостаточной развитости компактной компонентной базы, в особенности актуаторов и источников питания, это все еще сложная инженерная задача, и большинство проектов остаются на уровне лабораторных прототипов.
Одно из альтернативных решений состоит в использовании живых организмов, например, тараканов или даже летающих насекомых, которые уже обладают способностью к эффективному передвижению. В их организм внедряют электроды, через которые подключаются электронные модули, контролирующие перемещения насекомого за счет электростимуляции.
Однако насекомые-киборги не полностью контролируются электронными системами. Они сохраняют свои особенности поведения, которые могут ограничивать их перемещение. Например, мадагаскарские свистящие тараканы, которые часто используются в экспериментах, склонны к снижению активности в ярко освещенных областях и при недостаточно высокой температуре. Кроме того, они предпочитают бегать вдоль стен, а не по открытым пространствам. Это приводит к сложностям в использовании насекомых-киборгов и требует оптимизации стимулирующих сигналов управления.
Группа инженеров под руководством Кейсуке Морисима (Keisuke Morishima) из Университета Осаки внедрила в систему управления тараканом-киборгом алгоритм машинного обучения, который позволяет автоматически стимулировать передвижение насекомого, чтобы оно не оставалось на одном месте. Так же, как и предыдущие исследователи, инженеры использовали особь мадагаскарского шипящего таракана из-за его больших размеров, достигающих семи сантиметров. Для передачи стимулирующих сигналов в усикообразные органы в задней части таракана (церки) были имплантированы платиновые электроды, соединенные медными проводами с приклеенным на спину насекомого шестиграммовым рюкзачком с электронными компонентами.
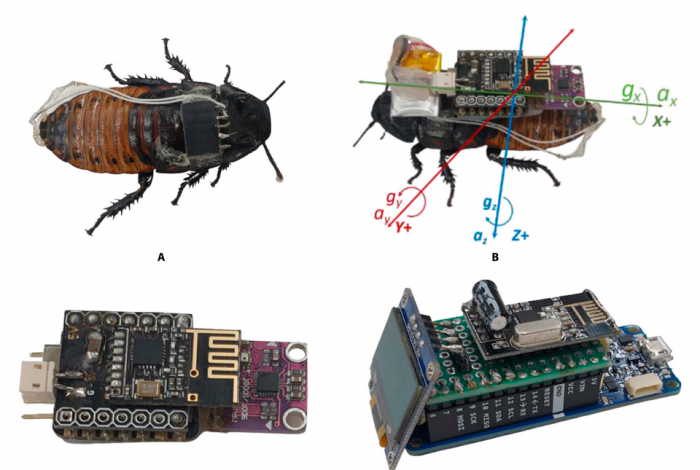 (А) Таракан с имплантированными электродами, (B) Таракан с подключенным рюкзачком, (внизу) Рюкзачок (слева) и Модуль беспроводной передачи данных (справа) / M. Ariyanto et al. / Cyborg and Bionic Systems, 2023
(А) Таракан с имплантированными электродами, (B) Таракан с подключенным рюкзачком, (внизу) Рюкзачок (слева) и Модуль беспроводной передачи данных (справа) / M. Ariyanto et al. / Cyborg and Bionic Systems, 2023
Данные о движении насекомого получают с помощью встроенного в рюкзак инерционного измерительного модуля, который с помощью акселерометра и гироскопа определяет текущие линейное ускорение и угловую скорость таракана. Эта информация по беспроводному каналу связи передается на персональный компьютер на вход алгоритма машинного обучения. Из данных, разбитых на окна по 1,5 секунды, извлекаются признаки, которые затем поступают на вход классификатора, определяющего двигается насекомое или нет. В случае, если таракан остается неподвижным дольше заданного времени, на его церки подаются электрические импульсы. Наиболее эффективным алгоритмом классификации в представленной задаче оказался метод опорных векторов.
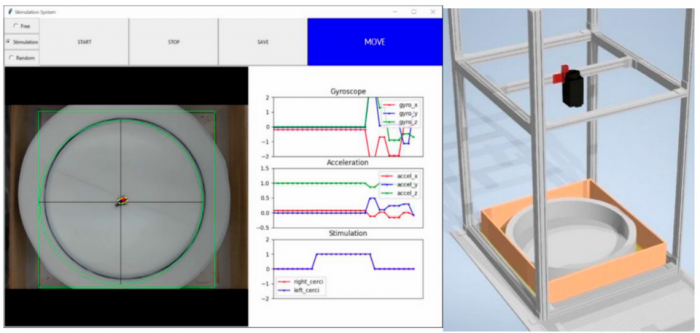 Интерфейс программного обеспечения, используемого для контроля движения таракана и 3D модель арены / M. Ariyanto et al. / Cyborg and Bionic Systems, 2023
Интерфейс программного обеспечения, используемого для контроля движения таракана и 3D модель арены / M. Ariyanto et al. / Cyborg and Bionic Systems, 2023
Для экспериментов инженеры построили арену в форме окружности, над которой разместили камеру для отслеживания реального положения насекомого. Без дополнительной электростимуляции три таракана, использованные в тестах, стремились оставаться в периферийной области у стен арены и избегали открытого пространства большую часть времени. Использование алгоритма и электростимуляции позволило снизить время простоя в среднем на 78 процентов, а время поиска и пройденную дистанцию увеличить на 68 и 70 процентов соответственно. При этом среднее время электростимуляции для всех тараканов составило всего 3,4 секунды. Таким образом алгоритм позволяет снизить количество сигналов электростимуляции и тем самым предотвратить утомление животного.
- Источник(и):
- Войдите на сайт для отправки комментариев
