Робот с микроактуаторами на метановом горючем перенес груз в 22 раза тяжелее себя. Принцип работы его актуаторов напоминает двигатель внутреннего сгорания
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Инженеры разработали актуатор для роботов, устройство которого напоминает двигатель внутреннего сгорания. Его основной элемент — миниатюрная камера сгорания, в которую подается горючая смесь, которая затем поджигается с помощью высоковольтного разряда. Давление расширяющегося нагретого газа затем может использоваться для совершения работы, например для приведения робота в движение.
Созданный на основе актуатора четырехногий робот способен совершать прыжки на высоту в 20 раз превышающую длину его собственного тела, ползать со скоростью 5,8 длины тела в секунду и переносить грузы в 22 раза превосходящие собственный вес.
Статья опубликована в журнале Science.
Одна из ключевых проблем, с которой сталкиваются инженеры при разработке микророботов, связана с выбором подходящего актуатора. Дело в том, что одновременно с уменьшением размеров происходит и снижение эффективности многих привычных способов актуации на основе электромоторов, пьезоэлектриков и диэлектрических эластомеров — они оказываются слишком слабыми и медленными, а роботы на их основе имеют ограниченную подвижность и низкую грузоподъемность. Одним из возможных решений этой проблемы могло бы стать использование энергии, образующейся от сжигания химического топлива, так как оно обладает более высокой энергетической плотностью.
Инженеры под руководством Роберта Шепарда (Robert Shepherd) из Корнеллского университета разработали актуатор, который работает подобно двигателю внутреннего сгорания. Он состоит из выполненной с помощью 3D-печати из огнеупорного полимера цилиндрической камеры сгорания объемом 0,09 миллилитра, внутри которой происходит сжигание химического топлива. В качестве горючей смеси используется метан и кислород.

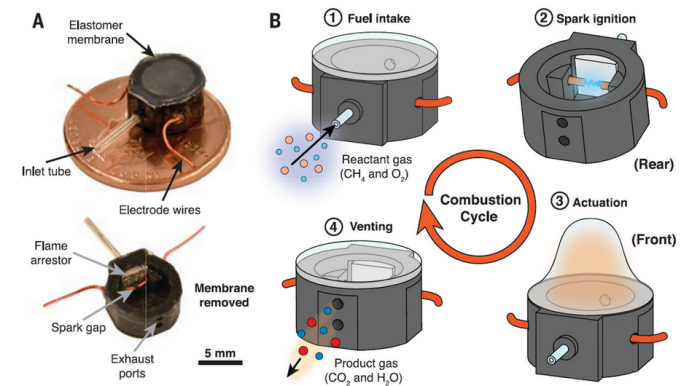
Смесь впрыскивается в камеру сгорания через топливную трубку в начале рабочего цикла. С помощью искрового разряда между встроенными в камеру двумя электродами, на которые подается напряжение около одного киловольта, происходит поджигание смеси. Образующееся при ее сгорании тепло приводит к объемному расширению газа внутри камеры. Это избыточное давление приводит к надуванию эластомерной мембраны, движение которой используется для выполнения полезной работы. Затем продукты горения в виде углекислого газа и водяного пара пассивно удаляются из камеры сгорания через выхлопное отверстие наружу, после чего цикл повторяется заново.
Актуатор может развивает силу до 9,5 ньютона и работать с частотой до 100 герц, растягивая мембрану на 140 процентов. При этом он демонстрирует высокую износоустойчивость — работа в течение более чем 750 тысяч циклов не выявила видимого снижения эффективности.
Применение актуаторов авторы продемонстрировали на миниатюрном четырехногом роботе. Его длина составляет 29 миллиметров, а масса — 1,6 грамма. Корпус состоит из двух полых внутри частей, соединенных мягкой перемычкой. Каждая из половин функционирует как отдельная камера сгорания, управляющая передней и задней лапами с одной стороны. Смесь метана и кислорода поступает через тонкие трубки в центре. Сжигание топлива приводит к расширению эластомерных мембран на концах обеих лап.
Регулируя частоту и синхронность зажигания искры, состав топливной смеси, и скорость, с которой она поступает в камеры сгорания, можно управлять типом походки и направлением движения робота. Например, при одновременном срабатывании камер сгорания в левой и правой половинах можно заставить робота подпрыгивать. Максимальная высота прыжка и преодолеваемая при этом дистанция составляют 59 и 16 сантиметров. Эти значения в 20 и 5,5 раза превышают длину корпуса робота. Кроме прыжков на разную высоту, робот также может ползать с различной скоростью и поворачивать.
Поворот происходит за счет разной ориентации передней и задней лап на каждой из половин: передние лапы, направлены внутрь к центральной линии тела, а задние — в сторону. Активация только одной стороны робота приводит к тому, что соответствующая задняя лапа и обе передние (они оказываются ближе друг к другу) отрываются от поверхности. Противоположная задняя лапа при этом остается практически неподвижной и служит точкой опоры, вокруг которой поворачивается робот.
По прямой робот развивает максимальную скорость почти 17 сантиметров в секунду что соответствует 5,8 длины корпуса робота в секунду. При этом робот способен нести на себе груз, превышающий его собственную массу в 22 раза. В текущей версии горючая смесь и напряжение для зажигания подводятся от внешних источников. В будущем инженеры планируют создать беспроводную версию, в которой система зажигания и резервуары с жидким топливом, например, с метанолом или гептаном, будут размещаться на самом роботе.
- Источник(и):
- Войдите на сайт для отправки комментариев
