Обуздаем «серую слизь»!
Представляем вашему вниманию работу одного из победителей нанотехнологической олимпиады, проводившейся порталом «Нанометр». Автор работы – Зайцев Сергей Александрович, студент химического факультета МГУ.
Создание наноробота невозможно.
Его существованию мешают фундаментальные термодинамические явления. Материалы в наносостоянии по существу (практически по определению) являются термодинамически нестабильными – в итоге сам наноробот будет термодинамически очень неустойчивым из-за очень большой поверхностной энергии относительно размеров. Даже если отбросить на данном этапе рассмотрения аспекты сборки и технические требования, наноробот очень быстро выйдет из строя из-за тепловых колебаний атомов при температуре человеческого тела: поскольку «на своём месте» при таком маленьком размере должен находиться каждый атом, неизбежное тепловое перемещение (диффузия) приведёт к сбою и выходу из строя механизмов, через некоторое время полностью распадётся весь наноробот – если считать, что его из условий очень низких температур, при которых он будет стабилен, поместить в реальные условия (в данном случае – человеческий организм). К этому добавится очень сильное взаимодействие молекул среды (в основном воды) с поверхностями робота – сильное взаимодействие с полярными молекулами затруднит работу (пусть ещё не вышедшего из строя от тепловых колебаний) наноробота, блокировав физически (образование комплексных связей молекул с поверхностью) имеющиеся инструменты и, возможно, средства передвижения + из-за термодинамических особенностей материалов в наносостоянии, указанных выше, молекулы воды (и не только) будут гидролитически расщеплять в молекулы растворимых (или агломераты нерастворимых) соединений тех элементов, из которых он состоит.
Если ещё полуабстрактная модель наноробота может стабильно существовать только при низких температурах, то при переходе к конкретике – необходимым техническим требованиям наноробота, создание с ТАКИМИ параметрами просто невозможно никак:
- 1) При размере в 100 нм уместить запас энергии в 1000 Дж невозможно в принципе. Никаких химических связей не хватит для такого маленького аккумулятора энергии, никакими физическими взаимодействиями невозможно уместить столько энергии в таком малом объёме. Нано-ядерным реактор быть не может – таких тонких слоёв атомов не хватит для удержания частиц высоких энергий.
- 2) Поскольку большую часть наноробота занимают аккумуляторы (требуемой ёмкости несуществующие), средства манипуляции с клетками и средства перемещения, на мозг наноробота остаётся очень мало места – никакой наноэлектроники не хватит для помещения в робота процессора и памяти, хоть сколько-нибудь пригодных для вычислений. Молекулярный процессор ещё можно будет использовать, но транзисторов из единичных молекул хватит только на считанные биты.
- 3) С очень маленькой памятью автономная работа будет невозможна: управление извне будет необходимо – со столь слабыми вычислительными мощностями и столь малых размерах внешнее управление является практически неразрешимой задачей. Крайне ограничены способы связи: вариант с материальными носителями физически невозможен (никакого устройства считывания информации у наноробота быть не может из-за его очень ограниченного размера, малой мощности и блокировки его инструментов внешней средой, даже не считая выхода из строя от тепловых колебаний). Передавать информацию с помощью электромагнитных волн невозможно из-за невозможности установки и нормального функционирования колебательного контура (приёмника э/м волн) по причине очень малого размера робота. К тому же – таким образом, если всё же создать установить на нанороботы приемники, ими нельзя будет нормально управлять по отдельности – настроить на разные частоты столь малые приёмники физически невозможно, да и из-за размера приёмников будет возможность передачи только очень короткими волнами – не длиннее микроволн, а скорее всего – ИК-излучения. Использовать внешнее управление будет очень сложно при невозможности управления отдельными нанороботами, а при столь малой их памяти это необходимо. Так что даже управлять нормально ими будет невозможно – нельзя настроить их на разные частотные диапазоны приёма
И самая большая сложность создания, как оказалось, с малым запасом энергии, быстро разрушающегося, не способного нормально функционировать, «глупого» и неуправляемого, наноробота состоит в сборке. Поскольку он может стабильно существовать только при очень низких температурах (не выше 100K, если не меньше), то соответственно и сборка должна производиться при этой температуре. При такой температуре невозможна никакая растворовая нанохимия, необходимо наноинструментами напрямую собирать из нанодеталей и отдельных атомов. Столь мелкая сборка (возможная только посредством атомно-силовой микроскопии), требующая огромной точности (которую уже вряд ли дадут АСМ-микроскопы) в любом случае потребует огромного количества времени на одного наноробота (за которое установленные атомы всё равно разбегутся) – многих лет.
Микроробот
70% до нас уже сделала природа. Бактерии – микророботы, способные самовоспроизводиться, напрямую приспособленные работать в условиях живого организма, способны обходиться без аккумуляторов – работая за счёт органических веществ, получаемых извне, и неоднократно практически уничтожавшие человеческую цивилизацию (много эпидемий было вызвано бактериальными заболеваниями) – катастрофа по Дрекслеру в почти чистом виде.
Создание микроробота – реальный проект, который даст возможность осуществления того, чего хотели добиться от нанороботов. За основу робота необходимо взять относительно среднюю по размерам бактерию (желательно симбиотическую человеку) или маленькое простейшее (тоже симбиотическое), а ещё лучше человеческую клетку и путём генной инженерии, с помощью наноэлектроники и микроинструментов сделать одноклеточного киборга.
Робот сможет работать с отдельными клетками, перемещение не будет представлять для него большого труда, будет возможно управление извне и хранение программ, не будет проблем с источником энергии и такой робот будет идеально соответствовать человеческому организму. Суть состоит во внедрении нанокомпьютера с радиоволновым приёмником, генетической модификации для возможности управления им и добавления инструментов-манипуляторов для выполнения необходимых функций.
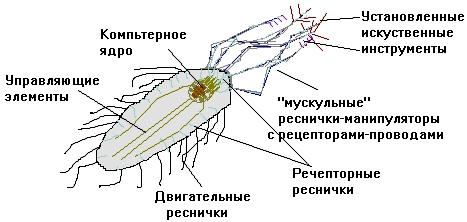
Сначала необходимо путём генной инженерии сделать клетку управляемой от встраиваемого компьютера – от электрических импульсов за счёт рецепторных ресничек, подводимых к нему; создать несложную «систему проводов» внутри клетки из ресничек (от мембраны клетки вовнутрь), чувствительных к электрическому напряжению, заставляющих сокращаться двигательные реснички (аналог мышечной системы). Т.е. мембрана клетки должна быть с мерцательными ресничками, способными сокращаться по сигналу от рецепторных ресничек и иметь просто мерцательные реснички для перемещения, также управляемые от рецепторов. Также нужно создать систему управляемых ресничек-мышц с более сложной системой управления рецепторами для установки на них наноинструментов и зондов из УНТ для операции с клетками.
Нанокомпьютер должен быть на основе УНТ-нанотранзисторов (ещё лучше на одноэлектронных схемах из них) со специальными элементами для управления клеткой – протяжёнными (с примерной длиной около 2/3 клетки) пластинками (нитями, трубками), на которых управляемо наводится потенциал на отдельных небольших участках. Установка компьютерного ядра внутрь клетки возможна только «хирургическим» путём с использованием методов работы с клетками, которые используются, например, при клонировании (пересадка ядер клеток с помощью микроскопических игл и шприцев). Потому что запрограммировать клетку на синтез такого компьютера не представляется возможным (в ближайшие лет сто), а методы сборки компьютеров такого типа возможны, и многие существуют уже сейчас. Электронные элементы для управления клеткой представляют собой просто массив проводников, перпендикулярных направлению длины элемента, отдельно подключённых к компьютеру; проводников не должно быть очень много – 2–3 десятка на элемент хватит с избытком. Их работа заключается просто в выборочной подаче потенциала от компьютера. Поскольку слишком сложно, не убив клетку, разместить провода-рецепторы клетки у нужных элементов компьютера и управляющих элементов, никакого размещения проводить недопустимо.
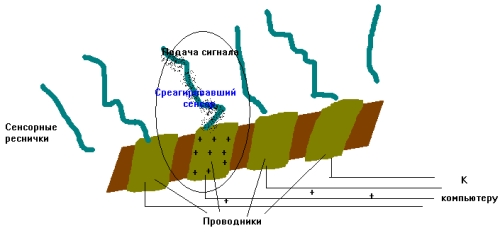 Схема работы управляющего элемента
Схема работы управляющего элемента
Через некоторое время после введения компьютера в клетку (для адаптированния и восстановления мембран) необходимо провести калибровку управляющих элементов (нужно, чтобы поверхность управляющих элементов была биосовместима с рецепторами, тогда будет обеспечен хороший контакт за счёт вживления) для того, чтобы определить, куда какой рецептор попал и какой участок элемента чем будет управлять. Для калибровки (последовательная подача потенциала на каждый элемент в отдельности) будет необходимо внешнее наблюдение (подготовка к работе микроробота – настройка компьютера) с помощью микроскопии и программирование компьютера для возможности управления на основе полученных данных.
Затем необходимо роботу «дать в руки орудие» – на манипуляторах осадить необходимые в работе элементы (нанотрубки, например), для этого нужно, чтоб на концах жгутиков-манипуляторов были специфические молекулы (это вопрос генной инженерии), на которые и прикреплять «инструменты» (на конце нанотрубки можно поставить какие-нибудь молекулы, комплементарные молекулам на жгутиках) – ими могут быть простые нанотрубки; модифицированные специальными молекулами, УНТ (для особых целей); конструкции из нанотрубок; интеркалированные нанотрубки… Затем провести калибровку системы управления манипуляторами – в сущности аналогичную калибровке системы управления, но с большей точностью, и количество проводников на управляющих элементах жгутиков должно быть больше для точного управления и возможности считывания (управляющие элементы жгутиков должны ещё уметь считывать с проводов-сенсоров).
Питание компьютер будет получать от мембранного потенциала клетки (т.е. работать за счёт питательных веществ с помощью метаболизма клетки). Управление компьютером осуществляется с помощью радиоприёмника микроволновых частот (приёмник на основе транзисторов из УНТ).
Размножение таких микророботов самостоятельно неосуществимо из-за невозможности воспроизвести такой компьютер биологической системой.
Вирусы
Большинство вирусов – это генетический материал, заключённый в одну или несколько белковых оболочек, за счёт которой из-за специфических белков на поверхности проникает через мембрану клетки, там растворяется (белок растворяется), высвобождая генетический материал. Т.е. это белковая наночастица с геном, предназначенная для проникновения в клетку ≈ липосома, значит большинство вирусов такие же нанороботы, как и липосомы = никакие (но исполняющие функцию нанороботов – проникновение в клетку и ввод чего-нибудь в неё). Но: ФАГИ. Фаги представляют собой белковые конструкции наноразмеров, способные прикрепляться к клетке, фиксироваться на ней и впрыскивать, как шприц, содержимое капсулы с геном. Фаги – единственный пример самостоятельной природной молекулярной машины.
Катастрофа по Дрекслеру
Такое событие невозможно как минимум по причине невозможности существования нанороботов. Даже если представить возможность стабильного существования нанороботов (и их возможность самовоспроизведения) – то возможны 2 варианта: либо – органические (из органических молекул) нанороботы, вышедшие из-под контроля, начнут перерабатывать все органические вещества, попавшиеся на пути, воспроизводясь в больших количествах. Но при этом им необходимо очень много энергии, которую им нужно откуда-то черпать, а вариантов очень мало: из химических связей это невозможно (из-за отсутствия метаболизма), из тепла тем более (из-за противоречия с термодинамикой). Из не подаваемых искусственно видов энергий – возможен только свет (для этого роботы должны быть приспособлены на его использование), но слабый даст очень мало энергии, сильный вызовет деструкцию (особенно на воздухе – метастабильные наночастицы органических веществ легко будут окисляться кислородом на свету), а отсутствие света (ночь или помещение со слабым освещением) просто «парализует» всех роботов. Да и роботы на органической основе очень легко будут разрушаться от нагревания или окислителей (хлорная известь, например), т.е. они почти как бактерии, с которыми сейчас больших проблем нет. Либо – неорганические; с ними та же самая ситуация с энергией, но они более стабильны (допустим) и не разрушаются он кипячения. Но всё равно сильными окислителями, сильным нагревом и ионизирующим излучением они разрушатся. Ещё появляется проблема самокопирования – для неорганических нанороботов потребуются разные химические элементы, в т.ч. и редкие, в результате, перерабатывая всё на своём пути, они не смогут самокопироваться из-за дефицита необходимых элементов.
Так что, подводя итог – даже при возможности существования самокопирующихся роботов, их неконтролируемое самовоспроизводство невозможно из-за необходимости либо постоянной подачи энергии в строго определённой форме, защита от окислителей и прочих опасных для органических веществ форм энергии и вещества, либо то – же + постоянная подача требуемых химических элементов. И то, и другое требует специальных лабораторных условий и не может происходить самопроизвольно. Так что катастрофа про Дрекслеру – антинаучная фантастика.
Молекулярные машины
В качестве примера можно привести уже упоминавшиеся жгутики бактерий и простейших, фаги и компоненты мембран клеток (ионные каналы). Также молекулярными машинами являются мышцы – 2 вида молекул белка вдето друг в друга: один белок – как поршень, второй – как цилиндр; меняя глубину вдевания внутреннего белка – меняется длина мышечного волокна.
Автор – Зайцев Сергей Александрович, студент химического факультета МГУ
- Войдите на сайт для отправки комментариев

Старая песня… сначала приводятся безграмотные «физические аргументы»:
«Его существованию мешают фундаментальные термодинамические явления. Материалы в наносостоянии по существу (практически по определению) являются термодинамически нестабильными – в итоге сам наноробот будет термодинамически очень неустойчивым из-за очень большой поверхностной энергии относительно размеров.»
Эти же самые термодинамические явления мешают и вашему существованию, так что вы тоже невозможны. Такая «аргументация» _дословно_ применима к белкам вашего тела.
Затем публике подсовывается авторское творение, имеющее мало отношения к обсуждаемому вопросу, но зато – очевидно абсурдное:
«При размере в 100 нм уместить запас энергии в 1000 Дж невозможно в принципе. … большую часть наноробота занимают аккумуляторы … со столь слабыми вычислительными мощностями и столь малых размерах внешнее управление является практически неразрешимой задачей.»
Ну да, аккумуляторы – это очевидная чушь. Ну да, если положить, что память маленькая и вычислительные мощности обязательно слабы, то так и получается. А что нам говорит _реальность_? Бактериальные клетки размером порядка 500 нм великолепно обрабатывают сведения об окружающей среде и перемещаются, куда им надо, совершенно невзирая на то, что в такой маленький размер НУ НИКАК невозможно упаковать аккумулятор и компьютер. И это – с громоздкими липидными мембранами, с жидкофазной химией, с чудовищно неэффективной системой управления… Дальше продолжать просто незачем. Желаю вам всяческих успехов в дальнейшем изучении химии!
Забавно так все время читать эту чепуху о якобы «термодинамических фундаментальных препятствиях», запрещающих создание нанороботов. И несут эту чушь очень часто даже маститые ученые всех сортов. Плохо учились они что-ли в ВУЗах? Изначально известно, что термодинамика, в особенности т.наз. «постулаты» ее, наука не фундаментальная, а статистическая. Существуют флуктуации, тем более значительные и тем более вероятные, чем меньше частиц в рассматриваемом ансамбле. Я бы вообще не брался для объекта размером в какие-то там несколько миллионов атомов определять температуру и прочие макротермодинамические параметры, которыми пользуется автор статьи для своего «опровержения».Статья – хороший пример «лженауки».
Аккумуляторы по сути дела в наномире вообще не нужны. Можно подводить энергию извне лазером, радиочастотными волнами или акустическими колебаниями. А можно – напрямую брать из крови АТФ и глюкозу (в случае работы роботов в теле).
Anonymous:
Термодинамика – наука статистическая и вполне себе фундаментальная. Для миллиона атомов вполне себе можно определить температуру и прочие термодинамические параметры; собственно, в силу эргодичности многие параметры можно определить даже для одного атома :) Просто вместо того, чтобы рисовать в своём воображении нанороботов «по образу и подобию» и затем удивляться тому, что они не смогут работать, надо начинать с особенностей физико-химических процессов на наноуровне, а потом уже «под них» выдумывать нанороботов. А то получится а-ля «человек не может выйти в космос, потому что он там задохнётся».
Да, аргументы типа «невозможно в принципе» слабоваты. Это напоминает байки из прошлого о том, что «человек никогда не сможет летать», «все уже изобретено до нас» или «640 кб достаточно для всех». Да и какого наноробота имеет в виду автор? Если понимать под этим программируемую молекулярную конструкцию для синтеза других молекулярных конструкций, то в каждом из нас сидят триллионы таких «нанороботов», имя которым ДНК. И где у них, интересно, «мозг», а где «руки»?:) Классическая архитектура здесь именно что неприемлема, однако это не значит, что невозможно создать элемент, который будет делать то, что нам нужно (используя в том числе и «деструктивные» силы), в одиночку ли или в виде колонии из нескольких миллиардов легко реплицируемых и уничтожаемых при необходимости копий.
Микрохирургия- ювилирный процесс, неприменимый для промышленного производства. А для простейших медицинских операций понадобятся миллиарды машин.
В корне вопрос в статье поставлен неправильно. Что подразумевается под нанороботами?. Совершенно не то, что разбирается в статье. Под нанороботами понимаются наночастицы, которые выполняю специальные функции. Понятие «нанороботы» – условное понятие.