Механоэлектрические микро- и нанорепликаторы и экспоненциальное производство
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
Одна из самых известных перспектив нанотехнологий – создание наномашин, способных к самовоспроизведению, или репликации. Многие ученые говорят, что подобные машины невозможно создать в принципе, но это не так. Мы уже рассказывали о создании первого макроскопического репликатора, т.е. машины, которая из набора строительных блоков может собирать свои копии.
То, что возможно в макромире, зачастую возможно и в наноразмерном диапазоне. Чтобы это проверить, специалисты компании Zyvex Corp. создали математическую модель простых самовоспроизводящихся машин. Но задача ученых состояла не в разработке репликаторов для «серой слизи». Они решили на основе репликаторов проверить модель экспоненциального производства.
Первые механические самовоспроизводящиеся системы были изготовлены десятилетие назад исследователем Пенроузом. Тогда же были сделаны электромеханические репликаторы. Однако эти репликаторы состояли из многих довольно сложных частей. В частности, репликаторы работали в определенной среде.
С развитием нанотехнологий ученые пытаются уменьшить размеры отдельных репликативных систем для того, чтобы использовать их в молекулярном производстве. Ниже мы представим модель механоэлектрического репликатора, разработанного компанией Zyvex Corp. Схематично узел сборки репликаторов показан на рис. 1. Отдельные части этой системы можно легко сделать с помощью современного производства.
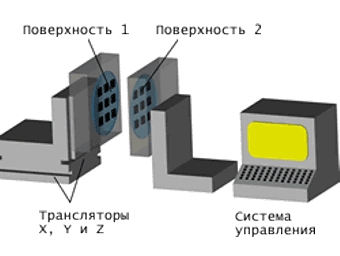 Рис. 1. Главные компоненты станции по изготовлению репликаторов. Две плоскости – матрицы «запчастей» для репликаторов
Рис. 1. Главные компоненты станции по изготовлению репликаторов. Две плоскости – матрицы «запчастей» для репликаторов
Плоскости-«запчасти», на которых размещены узлы репликаторов, зафиксированы на позиционном механизме-трансляторе, который управляется с помощью сборочного процессора. Каждый репликатор состоит из двух частей: базы с поворотным диском и держателя захвата. Части изготовлены таким образом, что при сборке они образуют одну микроструктуру.
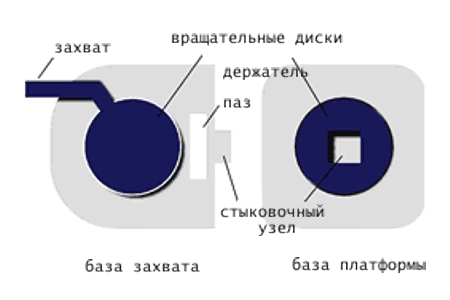 Рис. 2. Структура частей репликатора
Рис. 2. Структура частей репликатора
Обе поверхности разделены на ячейки, в каждой из которой находятся однотипные части ассемблера. Система управления знает о месторасположении каждого компонента репликатора и об алгоритме самосборки. Все компоненты привязаны к двумерной декартовой системе координат А (x,y). Нижний левый угол, связанный с компонентом №1, имеет адрес A(1,1), верхний правый – A(n,n), где n – количество репликаторов на матрице.
Функционирование станции происходит следующим образом: две сборочные поверхности располагаются таким образом, что комплементарные запчасти находятся друг против друга. Затем манипулятор сдвигает обе сборочные плоскости до контакта сборочных узлов друг с другом. Происходит захват собранными платформами определенных частей новой системы (в модели Zyvex это захваты, см. рис. 1). Как только этот этап сборки заканчивается, плоскость В поворачивается на 1800 по оси z, что приводит к поднятию захватов над поверхностью сборочной платформы. Последний этап сборки состоит в соединении баз с перевернутыми захватами. В результате проделанных операций на платформе А остается готовая матрица репликаторов. В конце концов, платформа В отодвигается, освобождая изготовленную партию устройств. Для повторения процедуры платформа В отправляется на «склад готовых репликаторов», а платформа А занимает ее место, собирая новую партию роботов из матрицы новоприбывших запасных частей.
Увидеть анимацию, иллюстрирующую самосборку репликаторов, можно по этой ссылке: http://www.zyvex.com/…nential.html.
Станция сборки нанороботов, описанная выше, может быть и сложнее, включать в свою структуру несколько параллельно собирающихся матриц нанороботов.
Zyvex предлагает изготавливать подобные матрицы с помощью электронной нанолитографии, как производят сегодня электронные микропроцессоры. Если удастся реализовать предложенную конструкцию репликатора в кремнии, то производство матриц репликаторов станет достаточно простой задачей.
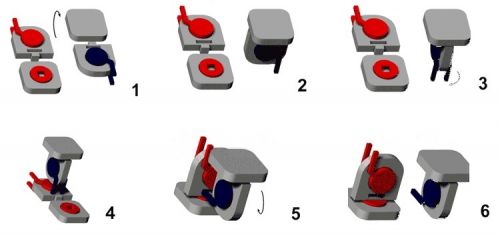 Рис. 3. Сборка репликаторов – схема
Рис. 3. Сборка репликаторов – схема
Эволюция МЭМС-устройств, известных на сегодняшний момент, позволяет надеяться на то, что подобные устройства можно будет изготовить и в наноразмерном диапазоне.
Наименьший размер компонентов МЭМС, которые можно изготовить с использованием современных технологий литографии, не превышает 2 мкм. Компоненты же интегральных схем гораздо меньше – около 0,10 мкм. Это дает повод надеяться, что матричное изготовление НЭМС и МЭМС на основе технологий, которые используются в микроэлектронике, позволит существенно уменьшить размеры микро- и наномеханики. Если же использовать молекулярные моторы совместно с НЭМС-устройствами, то это приведет к значительному уменьшению размеров матриц-роботов, и логичным продолжением технологии репликаторов от макроскопических устройств к микроскопическим будут самовоспроизводящиеся наноустройства.
Теория экспоненциальной сборки кинематических машин была впервые выдвинута Фон Нейманом в 1940-х годах. Он впервые построил математическую модель сложных самовоспроизводящихся машин и заложил основы теории экспоненциального производства механизмов.
То, что репликаторы возможны в принципе, было доказано сначала теоретически исследователями из NASA, а затем экспериментально учеными из Корнелльского Университета, Итака.
Ученому Ходу Лиспсону удалось сконструировать многозвенного робота (http://old.nanonewsnet.ru/index.php?…), который помнит свою изначальную морфологию (т.е. строение собственного тела из элементарных кубиков-частей) и может по этой «цифровой ДНК» создать свою копию из подручных строительных блоков – кубиков.
Первый робот-прототип состоял всего лишь из трех кубиков, но в процессе исследований его «обучили» таким образом, что к трем кубикам добавились еще два, и робот стал представлять собой нечто вроде «змейки».
 Рис. 4. Первый макрорепликатор
Рис. 4. Первый макрорепликатор
Долгосрочный план Липсона состоит в том, чтобы проектировать роботы, сделанные из сотен или тысяч идентичных модулей. Они смогли бы восстанавливать себя при отказе частей, изменять свою конфигурацию, чтобы лучше выполнить задачу или даже делать себе дополнительных помощников.
«Одно из основных применений такого робота – космические исследования. Представьте себе, что мы пошлем зонд на одну из лун Юпитера. Если он разобьется, ударившись о ее поверхность, то миссия будет провалена. А робот на основе клеточных автоматов сможет из строительных блоков собрать себе помощников и начать исследования, даже если приземление будет неудачным» – говорит Ход.
Естественно, что на основе подобных блоков можно будет повторить робота Хода в наномасштабе. Тогда его можно будет использовать для проведения хирургических операций внутри человеческого тела. Благодаря перестраиваемой форме, такой робот сможет пройти по отдельным сосудам к месту, где нужно выполнить задачу, при необходимости, изменить свою форму и доставить нужный хирургический инструмент.
Конечно, для самовоспроизводства этому типу роботов необходимы строительные блоки, которые сам он, естественно, изготовить не в силах. Точно так же работает и вышеописанный репликатор: для воспроизводства ему необходима матрица-полуфабрикат.
Для универсального самовоспроизводства наномашин необходимо, чтобы он сами производили строительные блоки, из которых они состоят. Так что угроза «серой слизи», вызванная неконтролируемым воспроизводством нанороботов, нереальна при использовании блочной структуры наномашин.
Только если наноустройства смогут обрабатывать окружающее сырье и из него изготавливать свои копии, то угроза «серой слизи» будет немного реальнее, правда, чтобы создать такие сложные наномашины, потребуется не один десяток лет.
Автор перевода – Свидиненко Юрий
- Источник(и):
-
Foresight Institute: Exponential Assembly
- Войдите на сайт для отправки комментариев

Ну сколько можно про «серую слизь»? Для сборки нужна энергия, а где простите ее возьмут вышедшие из под контроля ассемблеры? В том то и дело, что нигде. «Серая слизь» – миф, такой же как и то, что в бушующем все будут создавать ассемблеры (от пищи до технических устройств). Это не рентабельно, так как затраты на обычное яблоко возрастут на порядки по сравнению с традиционным путем. Так что если не дать ассемблерам возможность восполнять энергозатраты без помощи человека, то «серая слизь» нам не грозит.
Вы можете ответить на такой вопрос? А где берут энегрию живые клетки, откуда в океане водоросли, как они растут, как размножаются? Где берет энергию сажем, вирус грипа. Основной источние энергии во вселенной это солнечная энергия. Как показывает практика, ее достаточно, для того, чтобы сформировалась клетка и достаточно для осуществления репликации этой клетки. Мне кажется что нанобот сможет черпать энегрию прямо из теплового движения молекул воздуха, это та энегрия, которая разносит запах, передает тепло, т.е. обычная кинетическая энегрия вызванная тепловым движением молекул – Броуновское движение.
Вобще, чтот эти статьи мне не сильно нравятся, чтобы понять квантовую механику необходимо избавится от привычных механических(Ньютоновских) представлений о мире. А тут, такое впечетление, что автор не владеет вообще принципами квантовой механики. Читая у меня создалось впечетление, что квантовая механика, это обычная механика только маленькая, но это ведь откоровенный спам.