Медицинский наноробот общего применения
Друзья, с момента основания проекта прошло уже 20 лет и мы рады сообщать вам, что сайт, наконец, переехали на новую платформу.
Какое-то время продолжим трудится на общее благо по адресу
На новой платформе мы уделили особое внимание удобству поиска материалов.
Особенно рекомендуем познакомиться с работой рубрикатора.
Спасибо, ждём вас на N-N-N.ru
В этой статье я попытаюсь описать устройство медицинского наноробота общего применения. Полное техническое описание наноробота выходит за рамки этой статьи и представляет собой отдельную научно-исследовательскую работу. Ниже я хотел бы остановиться на описании основных систем наноробота и его предполагаемом устройстве.
Какие подсистемы должен иметь наноробот?
- Так как основная функция наноробота – передвижение по кровеносной системе человека, то он должен иметь мощную навигационную систему.
- Устройству необходимо иметь несколько типов различных сенсоров для мониторинга окружающей среды, навигации, коммуникации и работы с отдельными молекулами.
- Также нанороботу необходима мощная транспортная система, доставляющая отдельные атомы и молекулы от хранилищ к наноманипуляторам, и обратно.
- Для работы с пораженными структурами устройство будет оборудовано набором телескопических наноманипуляторов разного применения.
- Материал, из которого будет изготовлен наноробот – алмазоид или сапфироид. Это обеспечит биосовместимость человека и большого количества наномашин.
- Также необходимо наличие приемо – передаточных устройств, позволяющих нанороботам связываться друг с другом.
- И наконец, для удержания крупных объектов необходимы телескопические захваты.
На основании выдвинутых требований я постарался построить модель медицинского наноробота общего применения. В идеальном случае, это устройство будет способно «ремонтировать» поврежденные клетки, ткани; производить диагностику и лечение раковых заболеваний и картографировать кровеносные сосуды; производить анализ ДНК с последующей ее корректировкой; уничтожать бактерии, вирусы, и т.п. В соответствии с [1], максимальный размер устройства не должен превышать 1×1×3 микрона (без двигательных жгутиков). Ниже на картинке представлен вид наноробота, выполненного из алмазоида (рис. 1, 2).
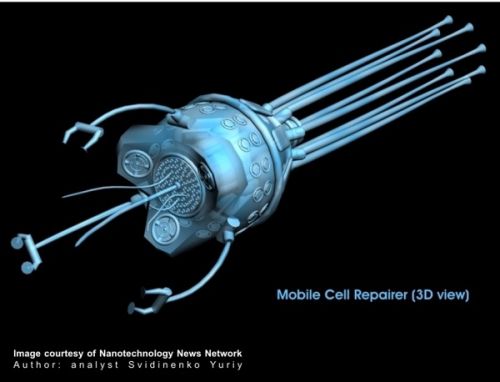 Рис. 1. Медицинский наноробот общего применения из алмаза
Рис. 1. Медицинский наноробот общего применения из алмаза
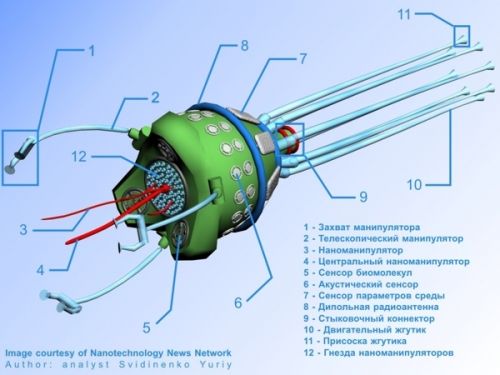 Рис. 2. Объяснение его структуры
Рис. 2. Объяснение его структуры
Электромагнитные волны, которые смогут распространяться в теле человека, не затухая, будут по длине волны сравнимы с нанороботом. Поэтому приемно-передающие антенны будут иметь вид диполей, выступающих за пределы корпуса. Наноманипуляторы, механические захваты и жгутики должны быть телескопическими и при необходимости должны складываться в корпус робота для того, чтобы робот смог лучше передвигаться в кровеносном русле. Иммунная система в основном реагирует на «чужеродные» поверхности. Размер наноробота также играет важную роль при этом, так же как и мобильность устройства, шероховатость поверхности и ее подвижность. Ряд проделанных экспериментов подтвердил, что гладкие алмазоидные структуры вызывают меньшую активность лейкоцитов и меньше адсорбируют фибриноген. Поэтому кажется разумным надеяться, что такое алмазоидное покрытие («организованное», т.е. нанесенное атом-за-атомом, с нанометровой гладкостью), будет иметь очень низкую биологическую активность. Благодаря очень высокой поверхностной энергии алмазоидной поверхности и сильной ее гидрофобности, внешняя оболочка роботов будет полностью химически инертна. Для такого наноробота, можно будет использовать нанокомпьютер, производящий ~106-109 операций в секунду для исполнения своей работы [1]. Это на 4–7 порядков меньше вычислительной мощности человеческого мозга, составляющей ~1013 операций в секунду. Так что этот наноробот не будет обладать искусственным интеллектом.
Не забудьте также, что это всего лишь описательная работа. Она не основана на результатах каких-либо расчетов. Ниже мы рассмотрим отдельные подсистемы наноробота (рис. 3, 4, 5).
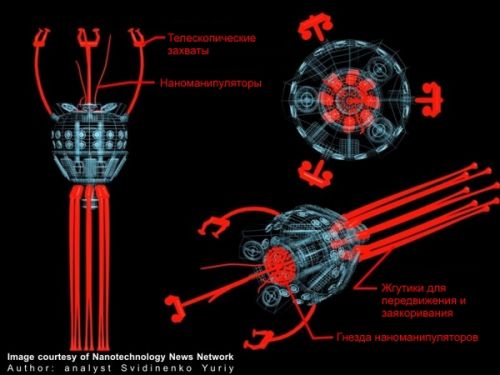 Рис. 3. Двигательная подсистема и подсистема заякоривания
Рис. 3. Двигательная подсистема и подсистема заякоривания
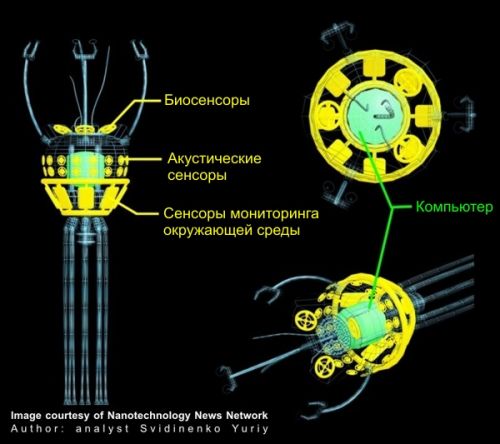 Рис. 4. Сенсорная и обрабатывающая подсистема
Рис. 4. Сенсорная и обрабатывающая подсистема
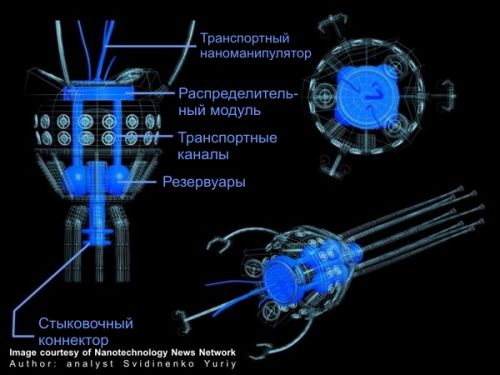 Рис. 5. Транспортная подсистема
Рис. 5. Транспортная подсистема
Для работы с внутриклеточными структурами нанороботу вовсе не обязательно целиком проникать внутрь клетки (можно повредить внутриклеточный цитоскелет). Зато телескопические наноманипуляторы предотвратят повреждение органелл и цитоскелета. Ниже приведены рисунки, изображающие наноробота в кровеносной системе и наноробота, ремонтирующего клетку in vivo (рис. 6, 7).
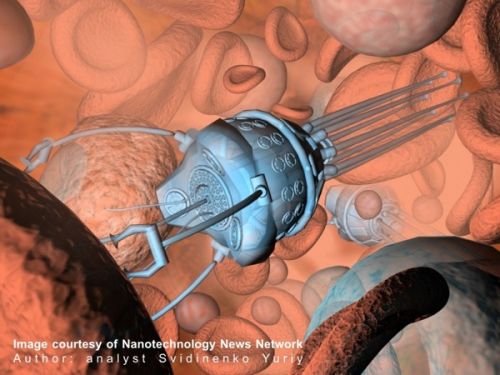 Рис. 6. Нанороботы в кровеносной системе
Рис. 6. Нанороботы в кровеносной системе
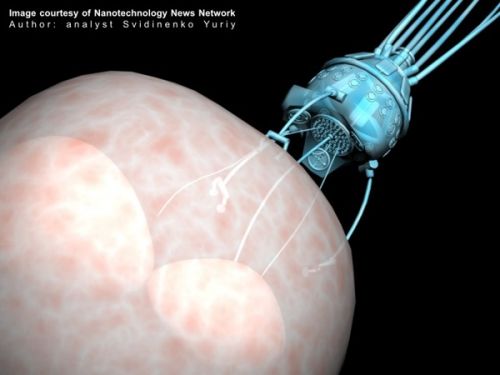 Рис. 7. Наноробот ремонтирует клетку
Рис. 7. Наноробот ремонтирует клетку
Для связи нанороботов друг с другом, а также для формирования навигационной системы полезно будет использовать еще один тип нанороботов – коммунноцитов [1], которые будут работать в виде усилительных станций.
Ссылки:
1. Robert A. Freitas Jr., Nanomedicine, Volume I: Basic Capabilities, Landes Bioscience, Georgetown, TX, 1999; http://www.nanomedicine.com/
Эта работа выполнена в пределах Проекта моделирования ускоренно развивающихся технологий. Проект проводится компанией Nanotechnology News Network.
- Войдите на сайт для отправки комментариев
